Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Can take image
L’acquisition d’images est activée par défaut. Si nécessaire, la commande can_take_image false permet de désactiver l’acquisition d’images.
Il peut être utile de désactiver l’acquisition d’images pour s’assurer qu’aucune image n’est acquise alors que le robot est toujours dans le champ de vue de la caméra. Par exemple, si vous désactivez l’acquisition d’images et entrez la commande get_part (Fig. 250), la commande ne pourra pas être exécutée (car elle effectue une acquisition d’images).
L’acquisition d’images est en attente jusqu’à ce que la commande can_take_image soit réactivée. Dès qu’elle est réactivée, le système reprend la commande en attente avec son comportement habituel.
Remarque
Le temps écoulé pendant can_take_image false est pris en compte pour le timeout.
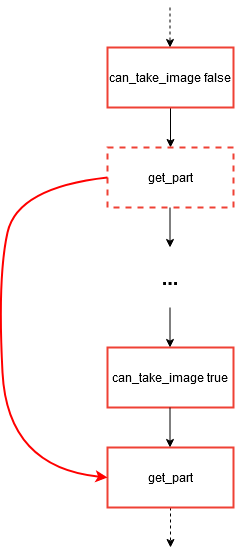
Fig. 250 scénario can_take_image