警告
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .6.3 Results
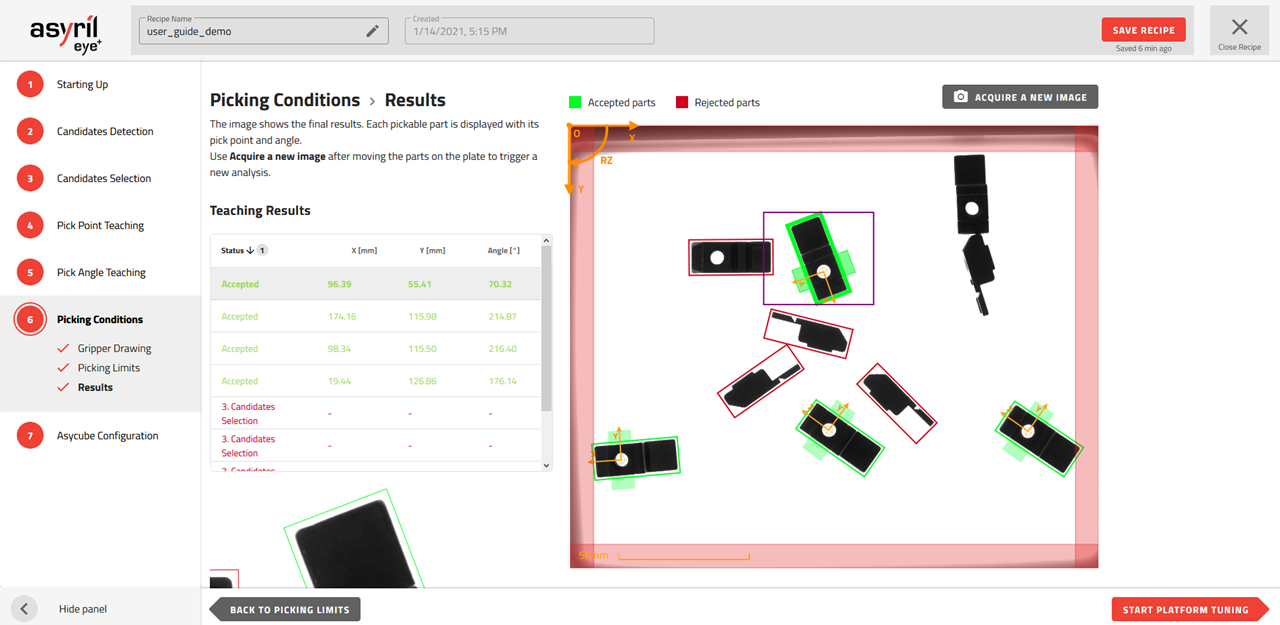
図 97 Picking Conditions - Results
The results of this step present all the final pickable parts. Coordinates of parts in green will be sent to the robot if a get_part command is called.
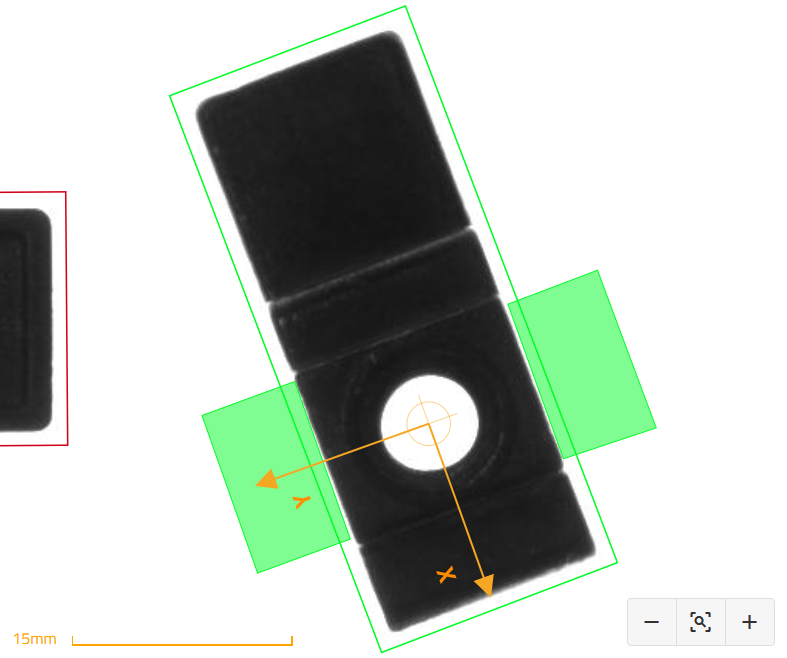
図 98 Picking Conditions - Results zoom on one part
All parts in red are rejected parts for picking. The table shows the rejection status of each part, i.e. in which step the parts have been rejected:
Candidate selection: if the part is in the wrong orientation.
Pick point teaching: if the pick point cannot be positioned on the part with a score higher than the defined threshold.
Pick angle teaching: if the pick angle cannot be positioned on the part with a score higher than the defined threshold.
Picking conditions: if the picking area of the part is in contact with an object or the picking limits.
注釈
If a part is not surrounded by a green or red rectangle it means it has already been filtered by the candidate detection step. In this case you may modify the parameters of this step.