警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .6.3 結果
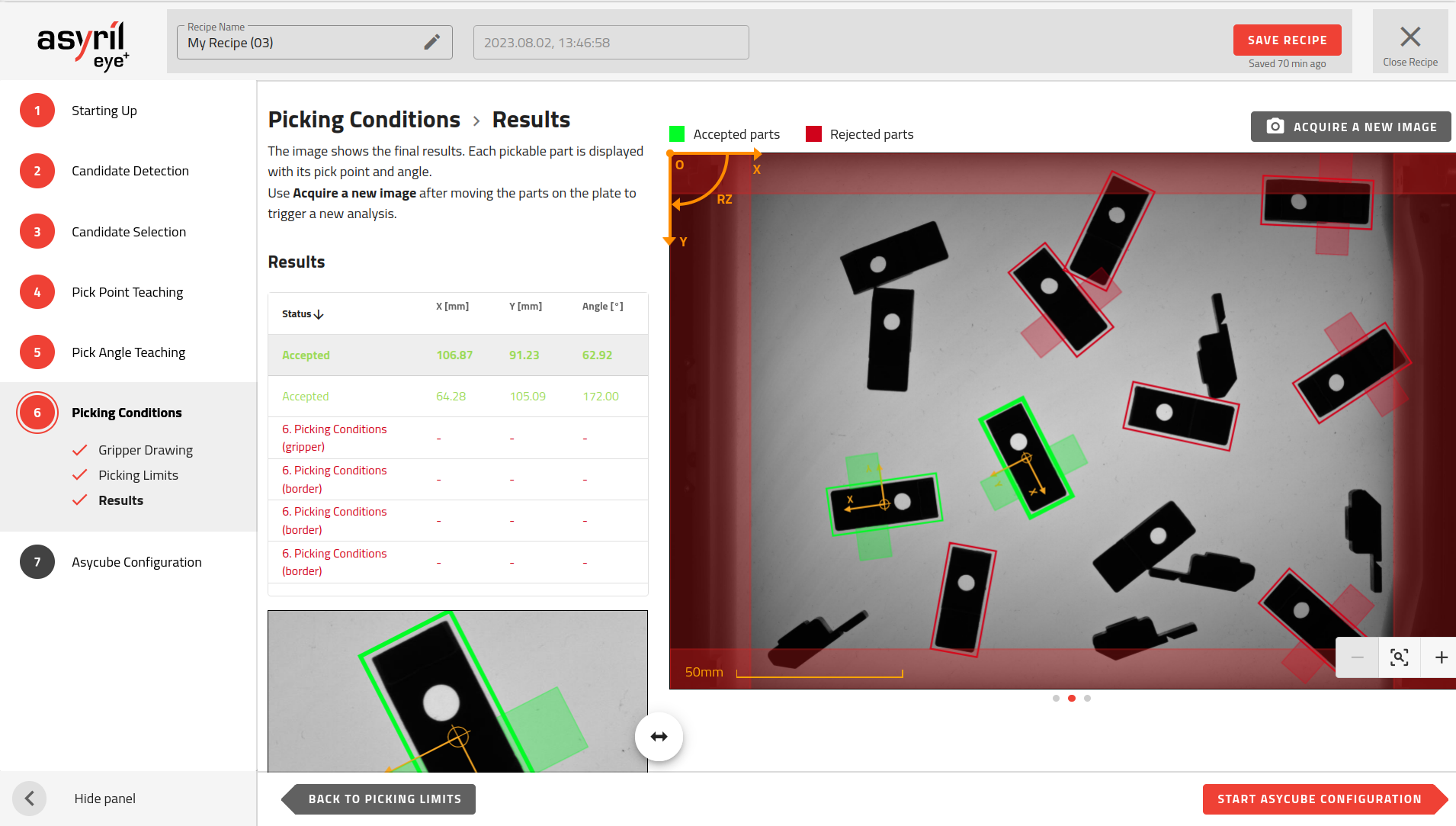
図 137 ピッキング条件 - 結果
このステップの結果では、最終的にピック可能なパーツをすべて表示します。緑色のパーツの座標値が、 get_part コマンドを受信した際にロボットへ送られます。
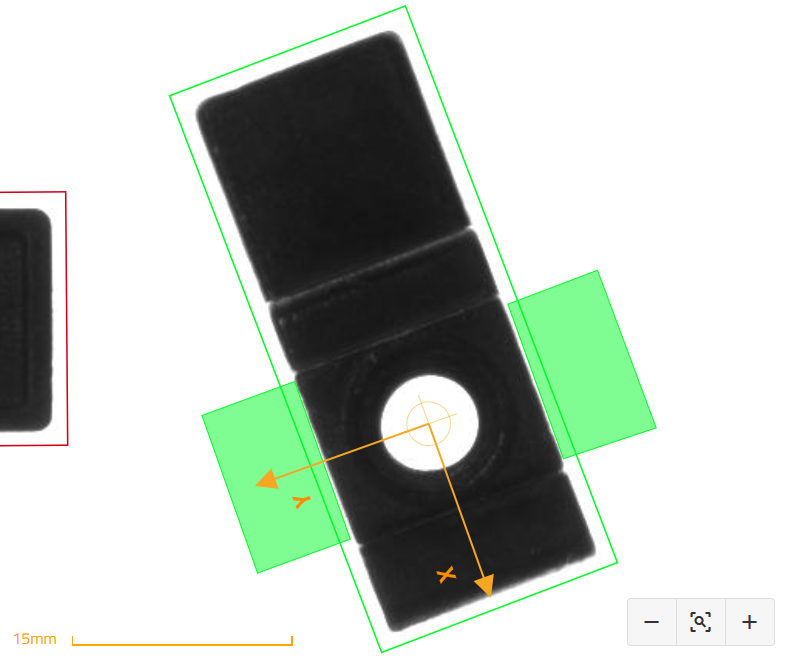
図 138 ピッキング条件 - 1個の部品の結果をズーム
赤色で表示されている部品はすべて、ピッキングしない不適当品です。表内に、不適当の理由、すなわち、どのステップで部品が不適当となったかを示します。
【候補の選択】 部品の表裏の向きが悪い。
【ピックポイントの学習】 定義したしきい値よりも高いスコアでピックポイントを部品上に配置できない。
【ピック角度の学習】 定義したしきい値よりも高いスコアでピック角度を部品に設定することができない。
【ピッキング条件】 部品のピッキングエリアが他の物体、またはピッキングリミットに接触している。
注釈
部品が緑または赤の四角形で囲まれていない場合、それは候補の検出の段階で既にフィルタリングされていることを意味します。この場合、部品の候補の検出のパラメータを変更することで条件を変更できます。