警告
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Part quantity = <n>
The part_quantity parameter is used to ask EYE+ to look for several parts at the same time. This means that every time EYE+ takes a picture, it will look for at least <n> parts on the image. If it does not find those parts, no coordinates will be sent and it will start vibrating and taking a new image until it gets those <n> parts.
This parameter influences the operation of the command get_part and prepare_part.
警告
Once EYE+ sends the n coordinates to the client, it assumes that in the next step all of these parts have been picked up. It means that the coordinates of the parts are then erased from the list of good candidates.
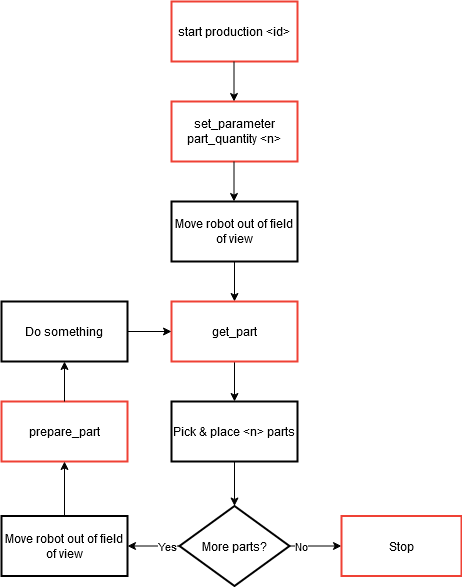
図 157 Production scenario with prepare_part, get_part and part_quantity = <n>
[set_parameter part_quantity <n>]: Set the parameter part_quantity to <n>.
[Move robot out of field of view]: Before calling the get_part command, you have to ensure that nothing obstructs the camera view.
[get_part]: Call the command get_part, it will either vibrate the Asycube and take a picture or send directly the coordinates of a parts. The Asycube vibration and image analysis will not end until finding <n> or more parts.
[Pick & place <n> parts]: Pick and place the <n> first parts.
[Move robot out of field of view]: Before calling the prepare_part command, you have to ensure that nothing obstructs the camera view.
[prepare_part]: Call the prepare_part command, it will either vibrate the Asycube and take a picture, or it will do nothing if the <n> parts have already been found and stored in memory.
[Do something]: Do whatever you need to do with your robot. This robot action will work in parallel with step 5. For this reason, make sure that the robot does not enter the field of view of the camera during this action.
Start again from step 1. The cycle stops when EYE+ receives the command stop production.