警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .Part quantity = <n>
part_quantity パラメータは EYE+ に同時に複数の部品を探すように指示するために使われます。これは、EYE+ が画像を取得する度に、画像上の少なくとも<n>個の部品を探すことを意味します。もしそれらの部品が見つからなければ、座標値は送信されず、<n>個の部品が見つかるまで振動して新しい画像を取得します。
このパラメータは、コマンド get_part および prepare_part の動作に影響を与えます。
警告
EYE+ がお客様にn個の座標値を送ると、次のステップではこれらの部品がすべてピックアップされると想定できます。その場合は、それらの部品の座標値は良い候補リストから消去されます。
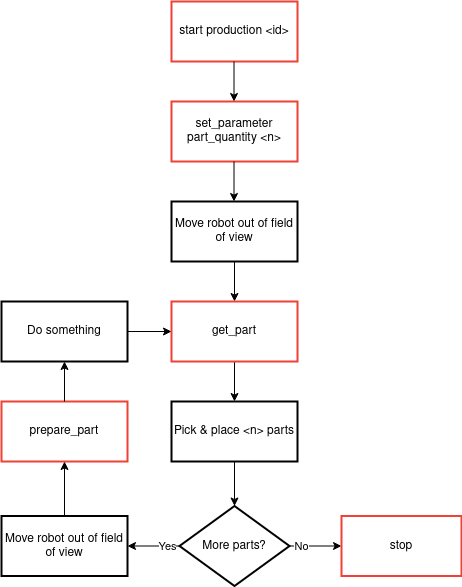
図 200 prepare_part, get_part, part_quantity = <n>個での自動運転シナリオ
[set_parameter part_quantity <n>] では、パラメータ part_quantity を <n> に設定します。
[Move robot out of field of view] では、 get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
[get_part]: コマンド get_part を呼び出し、Asycubeを振動させて画像を取得するか、部品の座標値を直接送信します。<n>個以上の部品が見つかるまでは、Asycubeの振動や画像解析は終了しません。
[Pick & place <n> parts]: 最初の<n>個のパーツをピックアンドプレースします。
[Move robot out of field of view] prepare_part コマンドを呼ぶ前に、カメラの視界を遮るものがないことを確認する必要があります。
[prepare_part] では、 prepare_part コマンドは、Asycube を振動させて画像を取得するか、または <n>個 の部品が既に見つかっていてメモリに保存されている場合は何もしません。
[Do something]: ロボットに実行が必要なことを何でもするように指示する命令。このロボットの動作は、ステップ5と並行して動作します。そのため、ロボットがカメラの視野に入らないように注意してください。
手順1からやり直します。EYE+ が stop production コマンドを受信するとサイクルが停止します。