Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Entnehmen Sie Ihre ersten Teile
Ihr System ist nun montiert, kalibriert und konfiguriert. In diesem Abschnitt wird das TCP-Terminal, mit dem Sie Ihr System testen können, und das Basis-Produktionsszenario vorgestellt.
TCP-Terminal
Das TCP-Terminal kann über den Ressourcenbereich auf der geöffnet werden.
Sie können auch über HILFE-Seite darauf zugreifen. Klicken Sie auf und dann auf .
Es wird die folgende Seite (Abb. 18) erscheinen.
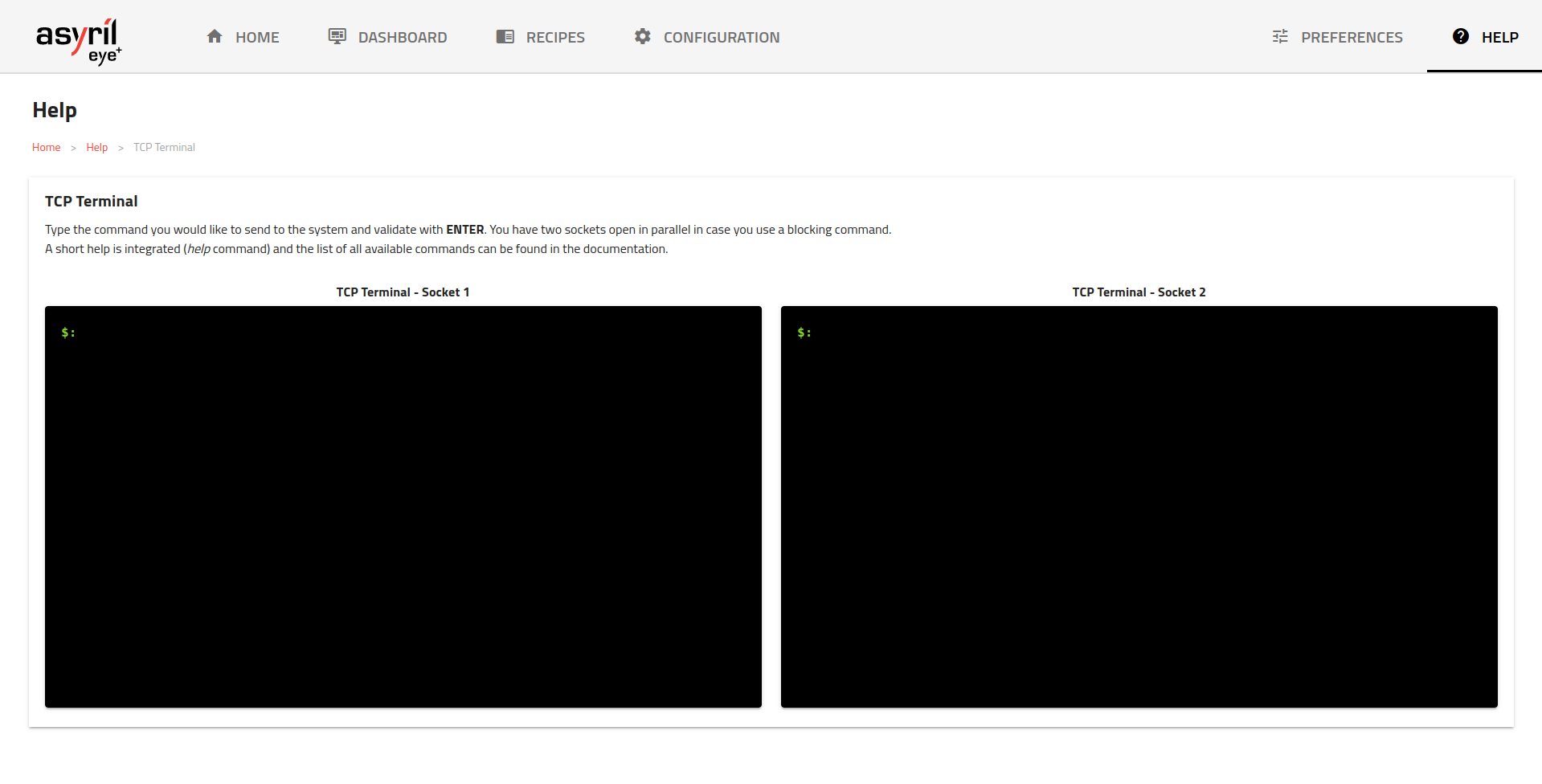
Abb. 18 TCP-Terminal
Die beiden Terminals kommunizieren mit dem EYE+ Controller über TCP/IP-Socket-Messaging (ein Socket pro Terminal).
Der EYE+ Controller muss im Status ready sein. Prüfen Sie den aktuellen Status, indem Sie den Befehl get_parameter <Parameter> (<Wert>…) eingeben, wobei <Parameter> gleich state ist. Die Antwort sollte 200 ready lauten.
Bemerkung
Wenn Sie sich im Status recipe edition, camera configuration, hand-eye calibration oder bereits in production befinden, stellen Sie sicher, dass Sie nicht noch eine weitere EYE+ Studio Seite geöffnet haben. Sollte dies der Fall sein, vergewissern Sie sich, dass Sie alles gespeichert haben und schliessen Sie diese.
Basis-Produktionsszenario
Abb. 19 zeigt das Basis-Produktionsszenario.
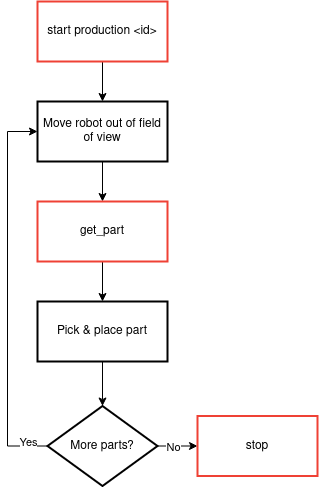
Abb. 19 Basis-Produktionsszenario
Geben Sie den Befehl get_recipe_list ein. Dies wird die Liste der vorhandenen Rezepte anzeigen, die im EYE+ Controller gespeichert sind. Ihr erstes Rezept sollte mit Namen und Identifikator erscheinen.
Starten Sie die Produktion durch die Eingabe von start production (wobei
<recipe_id>Ihr Rezept-Identifikator ist). Dies schaltet EYE+ in den Produktionsstatus.Stellen Sie sicher, dass sich der Roboter nicht im Sichtfeld der Kamera befindet.
Legen Sie mindestens ein Teil auf den Asycube und geben Sie get_part ein. Sie werden eine Meldung ähnlich der folgenden erhalten:
200 x=0.12345 y=6.78910 rz=11.12, wobei 200 eine positive Bestätigung ist und x, y und rz die Koordinaten des erkannten Teils im Koordinatensystem des Roboters sind.Fahren Sie mit Ihrem Roboter zu den erhaltenen Koordinaten und entnehmen Sie das Teil.
Wenn Ihr Roboter das Teil entnommen hat und Sie das nächste Teil beziehen wollen, geben Sie einfach erneut get_part ein.
Bemerkung
Wenn Sie bei keinem der Befehle die Antwort 200 erhalten, überprüfen Sie die Fehlercodes, um weitere Informationen zu Ihrem Problem und zur Fehlerbehebung zu erhalten.
Tipp
Wenn Sie stop <Status> eingeben (wobei <Status> als production definiert ist), können Sie das System wieder in den Status ready wechseln.
Ihre erstes Pick and Place
Nun sind Sie bereit, Ihr erstes Roboter/SPS-Programm zu implementieren, um mit EYE+ zu kommunizieren.
Sie können alle Befehle verwenden, die im Abschnitt Befehle beschrieben sind.
Im Abschnitt Produktionsszenarien werden verschiedene Produktionsszenarien beschrieben.