Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Présentation du module
Le module EtherCAT est schématiquement équivalent au suivant :
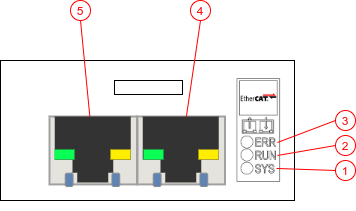
Fig. 256 Module EtherCAT
LED système (SYS)
LED de fonctionnement (RUN)
LED d’erreur (ERR)
Interface X1 (EtherCAT IN), standard RJ45
Interface X2 (EtherCAT OUT), standard RJ45
Signal LED
Le tableau suivant décrit la signification des différentes LED présentes sur le dispositif.
LED |
Couleur |
Signal LED |
Description |
|---|---|---|---|
RUN |
Éteinte |
Éteinte |
Module en état INIT |
Verte |
Clignotante |
Module en état PRE-OPERATIONAL |
|
Verte |
Flash unique |
Module en état SAFE-OPERATIONAL |
|
Verte |
Allumée en continu |
Module en état OPERATIONAL |
|
ERR |
Éteinte |
Éteinte |
Pas d’erreur |
Rouge |
Clignotante |
Erreur interne |
|
Rouge |
Flash unique |
Erreur interne |
|
Rouge |
Allumée en continu |
Erreur interne |
|
LED Ethernet |
Éteinte |
Éteinte |
Aucun lien établi |
Verte |
Clignotante |
Le module transmet |
|
Verte |
Allumée en continu |
Un lien est établi |
Topologie de réseau
Lorsque plusieurs appareils EtherCAT doivent être connectés, deux topologies peuvent être mises en œuvre :
- Topologie en série (daisy chain) et/ou en étoile :
Les modules sont connectés en série de sorte que la sortie EtherCAT du Module 1 est connectée à l’entrée EtherCAT du Module 2, et ainsi de suite. Le dernier module n’a pas besoin d’être connecté au Master.
- Topologie en anneau :
Les modules sont connectés de manière à former un anneau, la sortie EtherCAT du module 1 est connectée à l’entrée EtherCAT du module 2, et ainsi de suite. Le dernier module est connecté au EtherCAT Master, formant ainsi un anneau.
Veuillez choisir la topologie qui correspond le mieux à vos besoins selon vos exigences.
Objets de données process (PDO)
EtherCAT permet d’échanger des données cycliques en temps réel à l’aide de d’Objets de données process (Process Data Objects, PDO). Il existe deux types de PDOs correspondants aux deux directions : RxPDOs et TxPDOs.
Toutes les commandes, tous les paramètres et toutes les données de sortie nécessaires sont implémentés dans les PDOs afin que vous puissiez facilement et entièrement intégrer votre EYE+ dans votre application. Les PDOs reflètent principalement l’interface du protocole TCP tout en fournissant une interface spécifique et pratique à utiliser. Nous vous recommandons vivement de lire le Guide de programmation TCP avant d’intégrer EYE+ à l’aide du module EtherCAT.
Le fichier ESI peut être téléchargé directement à partir des Téléchargements EtherCAT.
RxPDO
Nom |
Type de données |
|---|---|
UDINT |
|
BOOL |
|
BOOL |
|
Recipe ID |
UDINT |
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
USINT |
|
REAL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
TxPDO
Nom |
Type de données |
|---|---|
UDINT |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
Répétition de 10 positions (N = 1 à 10) |
|
REAL |
|
REAL |
|
REAL |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
Répétition de 6 modèles préparés (N = 1 à 6) |
|
USINT |
|
Répétition de 6 valeurs de retour du paramètre Model Quantity (N = 1 à 6) |
|
USINT |
|
Répétition de 10 Pose Model (N = 1 à 10) |
|
USINT |
|