警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .ビジョン校正の機能
チェッカーボードの補正点は?
「画像の歪みを補正」 一度キャリブレーションを行うと、画像を取得する度に自動的に歪みが補正されます。
注釈
歪みとは何か、どのように補正されるのかについては、 歪み補正 を参照してください。
「関心領域ROI(Region of Interest)の定義」 ROI は、後に画像解析に使用するために画像内で残しておく領域のことです。これにより、画像解析に使用されない画像領域を除去します。
画像の左右には、常にAsycube 以外の領域があります。
システム構築する時、画像の同じ部分が常に他のデバイス(ホッパー、ロボット、照明など)によって隠されている場合、この部分はROIから自動的に除去されます。
重要
このため、画像の望ましくない領域を確実に除去するために、自動運転時に得られる画像と同じような画像領域となるようにして、システム構築(カメラ設定)を行うようにしてください。
より良いキャリブレーション結果を得るために、ホッパー、ロボット、ライトなどを解体しないでください。レシピ編集時や自動運転時に画像解析エラーの原因になることがあります。
図 157 では、ROIは、チェッカーボードを囲んでいる緑色の四角形です。
「ピクセルミリメートルやピクセルインチスケールの決定」 視野システムの座標の原点と向きは変わりません( 図 220 )。ビジョン校正前のシステム座標は、X が0 から3072 ピクセル、Y が0 から2048 ピクセルです。校正後のシステム座標は、0から画像の幅のミリ/インチ表示、0から画像の高さのミリ/インチ表示になります( 表 34 )。
表 34 ビジョンの座標変換 校正前
校正後
参照
X
Y
X
Y
ポイント1
0
0
0
0
ポイント2
3072px
0
幅
0
ポイント3
0
2048px
0
高さ
ポイント4
3072px
2048px
幅
高さ
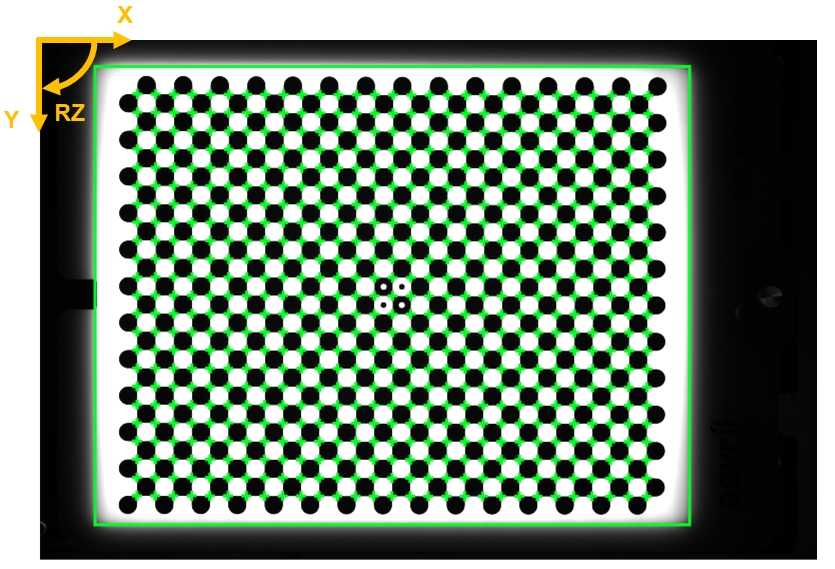
図 220 ビジョンシステムの座標
歪み補正
ビジョン校正の主な目的は、歪み補正です。
歪曲収差は単色光学収差の一つで、 固定の動作距離に対して画像内で倍率が変化することを意味します。歪んだチェッカーボードの画像は、直線ではなく曲線になります (図 221 の左のチェッカーボード)。
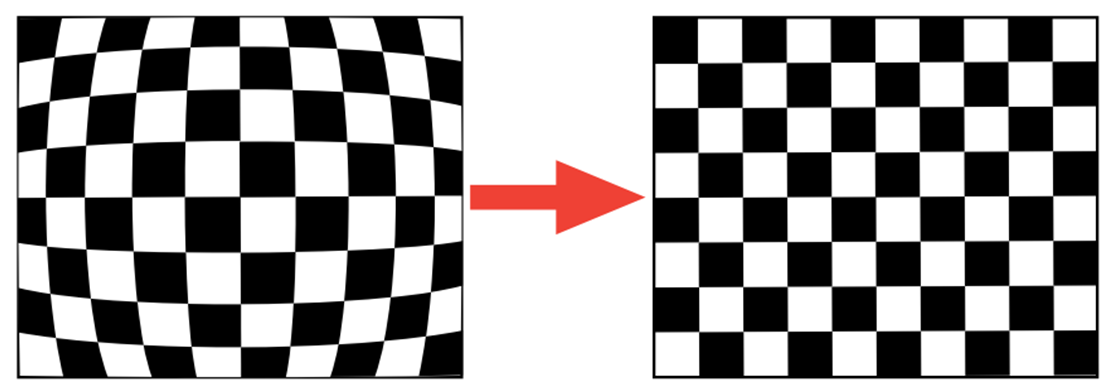
図 221 光歪み補正(左:校正前、右:校正後)
歪みは、情報を幾何学的に変位させるだけなので、技術的には画像に含まれる情報を減少させることはありません。 これは、画像から歪みを効果的に計算できるため、多くの情報を失うことなく補正することができることを意味します。
歪曲モデルは、歪曲された画像のチェッカーボードの線に適合するように、歪曲パラメータとカメラの内因性および外因性の特性のパラメータを探索することによって決定されます。モデルは、湾曲した線を再構成しようとします。これらのパラメータが見つかると、歪み補正変換を歪曲した画像に対して適用することができます。
注釈
歪み補正変換は、画像に適用される歪みパラメータに基づく数学的操作です。画像解析を行う前に、取得した各画像に適用されます。
図 157 は、歪み補正前(左)と補正後(右)のチェッカーボードの画像を示しています。検出されたチェッカーボードのコーナーは緑の十字で表されます。
RMS エラー
9. カメラの設定の結果 のステップでは、歪再構築の二乗平均平方根誤差(RMS)を提供します。これは,想定されるチェッカーボードと歪み再構築の結果として得られるチェッカーボードとの間の平均誤差です。再投影誤差がゼロに近いほど、見つかったパラメータの精度が高くなります。
警告
RMS 誤差が1より大きい場合は、補正が適用されません。
注釈
さらに、チェッカーボードは結果ステップ9で提示されたピクセル/ミリ、またはピクセル/インチのスケールを決定するために使用されます。
視差補正
ステップ7でカメラの高さ(動作距離)を入力し、またレシピのデータに部品の高さを入力することにより、システムは視差効果を補正することができます。
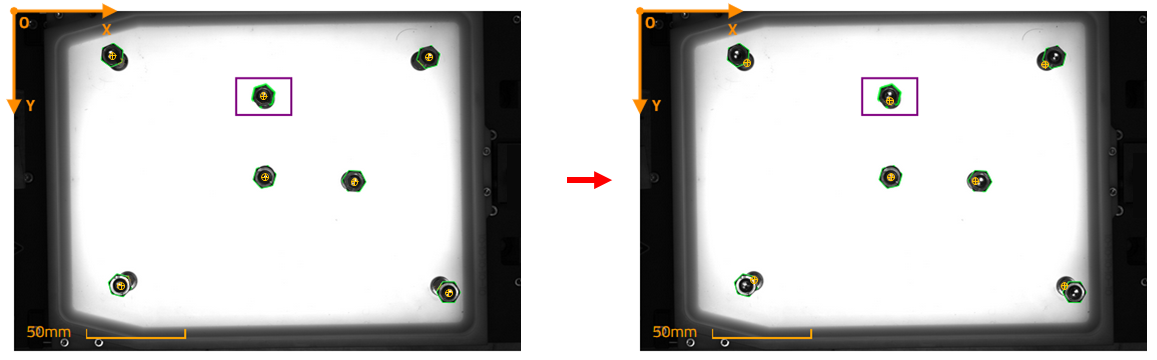
図 222 左: 視差補正前、右: 視差補正後;黄色のターゲットで表示されるピックポイント
視差とは、2つの異なる視線に沿って見た物体の見かけ上の位置の違いのことです。 EYE+ アプリケーションの場合、カメラの視点から見た部品の2D画像は、部品が高さが高く、Asycube の中心から離れている場合、部品の上面と下面の間に遠近感を導入します。上面は下面からオフセットによりずれます。この現象により、ピック座標値にずれが生じます。部品が高いほど、視差が大きくなります。
図 223 で示されている状況では、カメラの視点から見ると、視差によって円柱の底面(右の円柱)に対して円柱の上面の右側にズレが生じます。視差によるYの変位は、黄色点(実位置)と赤点(EYE+ で検出された位置:遠近法のためこの位置がずれる)との距離 e です。黄色点はカメラ平面上(水平の黒色の破線)に投影された円柱中心の補正位置です。
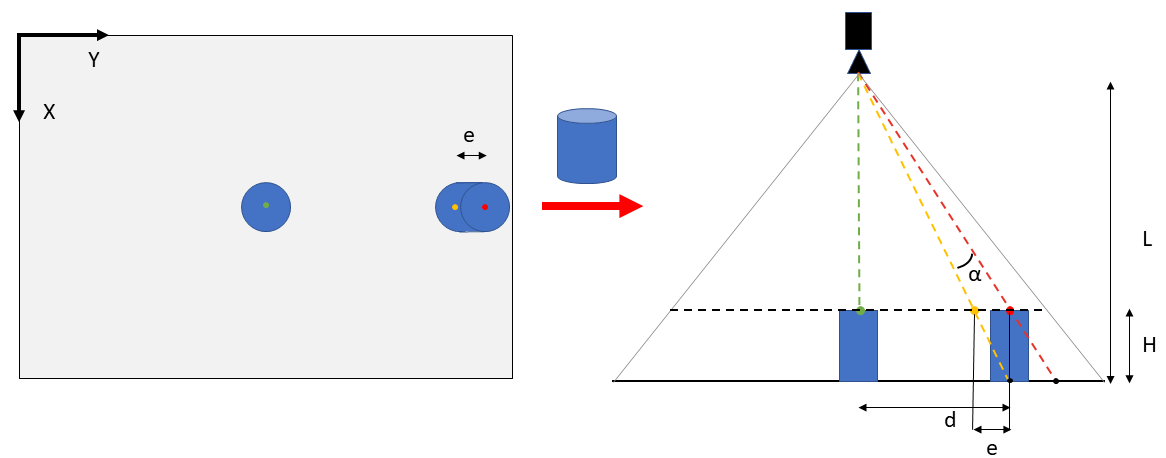
図 223 円柱の視差補正(左:上から見た図、右:横から見た図)。黄色の点 :実際のピッキング位置;赤の点 :視差補正を行わずに EYE+ で検出した位置。
ヒント
カメラ面(黒色の点線)に投影された下側の平面(水平の黒線)の補正された画像をイメージしてみてください。画像はビジョンの円錐内に残るようにRを補正します。
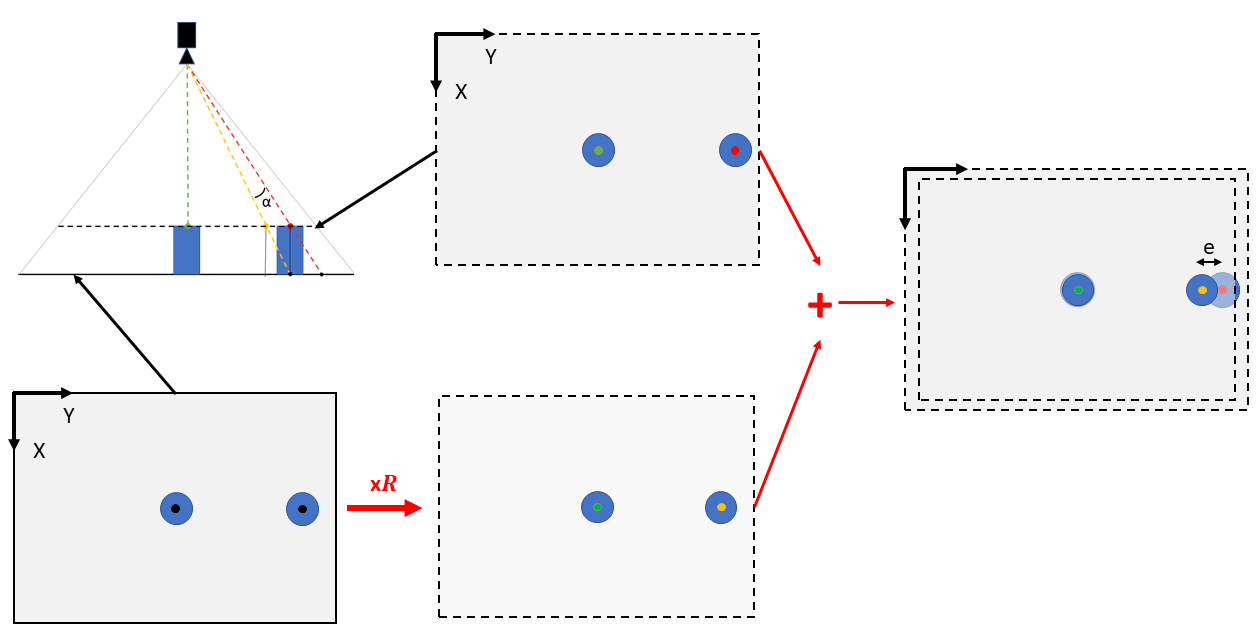
図 224 下の平面(水平の黒線)を投影した、上から見たカメラ面(水平の黒点線)のビュー。投影はRの比率で補正されています。
EYE+ は、Asycube の表面上の部品の位置の変動に起因する視差効果を、Asycube のプレート上の部品の位置に応じて X 座標と Y 座標にオフセットを加えることで補正します。プレートの端に位置する部品は、中央に位置する部品よりも大きなオフセットを持つことになります。これらのオフセットを計算するために、システムは、部品の高さとカメラの高さを知る必要があります。
注釈
視差補正は、カメラの設定時には行われませんが、後で座標値の計算のために部品の高さをシステムに入力する時に行われます。