警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .5.3 結果
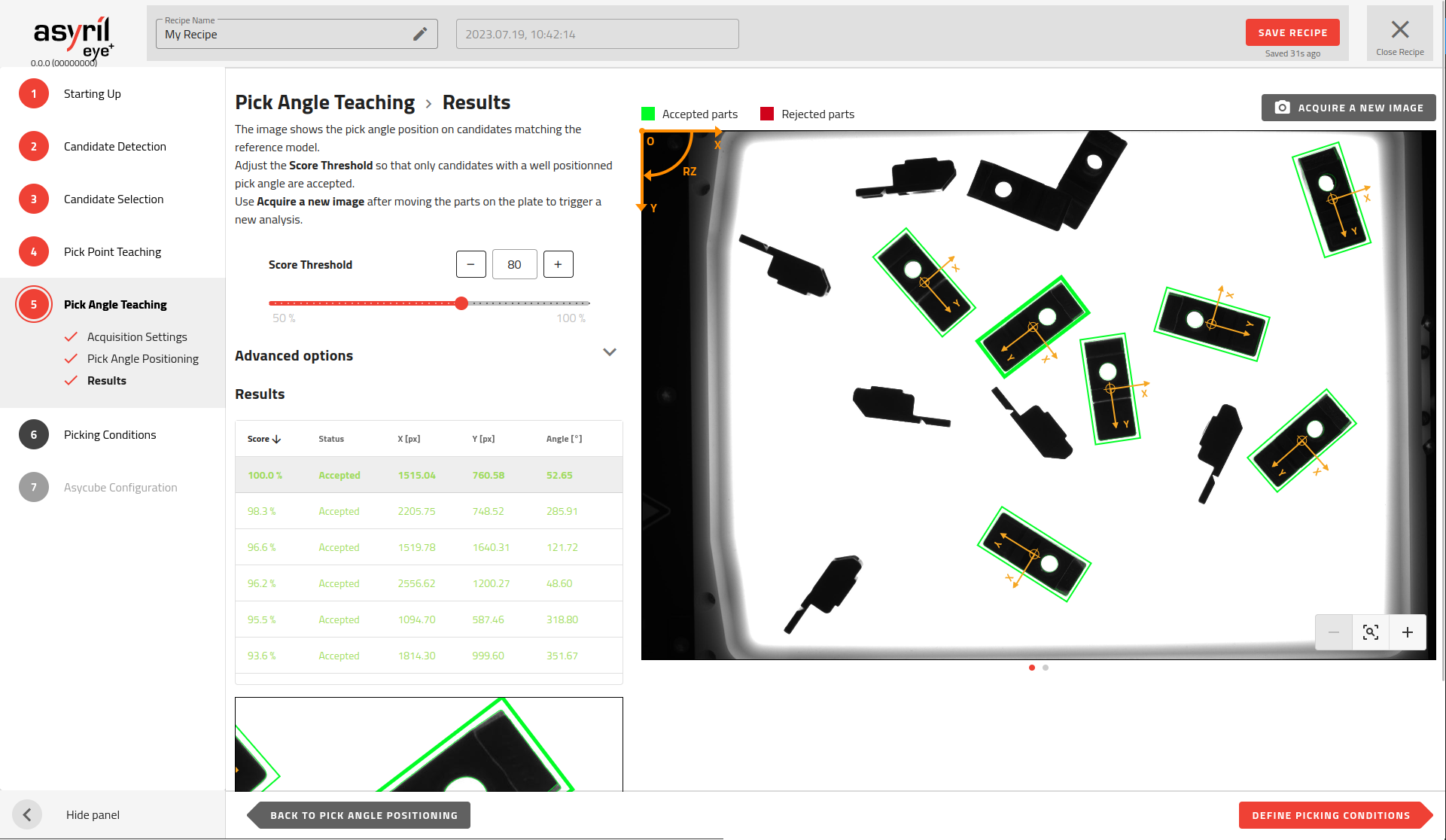
図 125 ピック角度ティーチング - 結果
ピックポイントの位置と残っているフィーチャーから参照部品のフィーチャーができます。この参照部品のフィーチャーと、すべての良い候補のフィーチャーを比較します。参照部品は回転を続け、良い候補のフィーチャーと可能な限りマッチさせます。
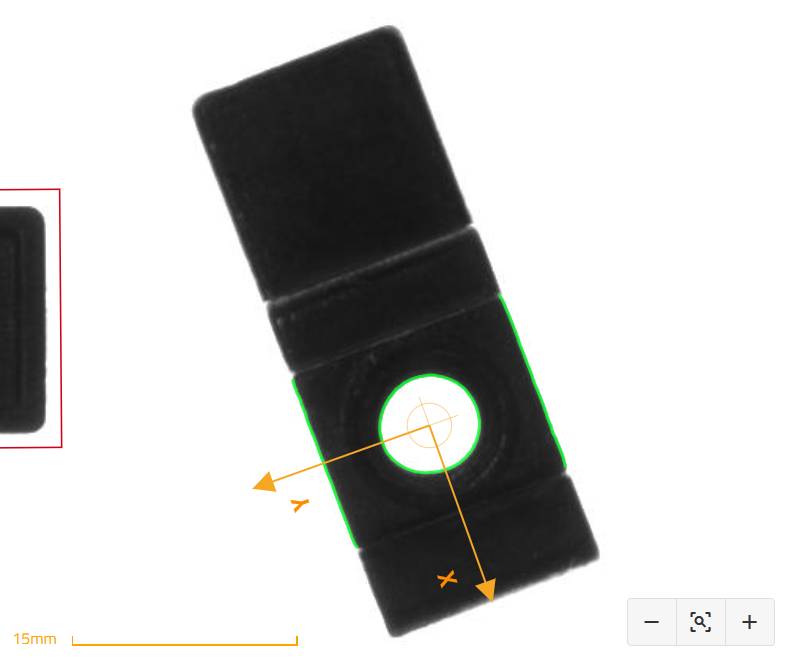
図 126 ピッキング角度のティーチング結果-ある部品の拡大
ヒント
アジキューブ上で手動で部品を移動させてから「新しい画像の取得」ボタンを押すと、新しい画像を解析して、ピック角度が常に正しく検出されているかどうかを確認することができます。
スコアは、参照部品と候補の間の一致率を表します。スコア100%は完全一致を意味します。
ヒント
結果表では、スコアの数値順に部品を並べ替えることができ、しきい値よりも高いスコアを持つすべての部品が正確に検出されているかどうかを簡単に確認することができます(すなわち、正しいピック角度の部品)。しきい値を調整して、正確に検出された部品のみが適当品となるようにします(緑の四角形で囲まれます)。
高度なオプション
高度なオプションの設定では、最大4つの角度除外範囲を追加できます。
注釈
除外範囲は、一対の角度からなります。部品の角度がこの範囲に当てはまると、その部品は「不適当」とみなされます。
範囲は -360°〜360° まで設定できます。ただし、ビジョンシステムは 0°〜360° までです。このため、角度が負の値で入力された場合、除外範囲を保存すると、360 を加算することで対応する正の値に転置されます。例えば、除外範囲 [-30; 30] は [330; 30] として保存されます。
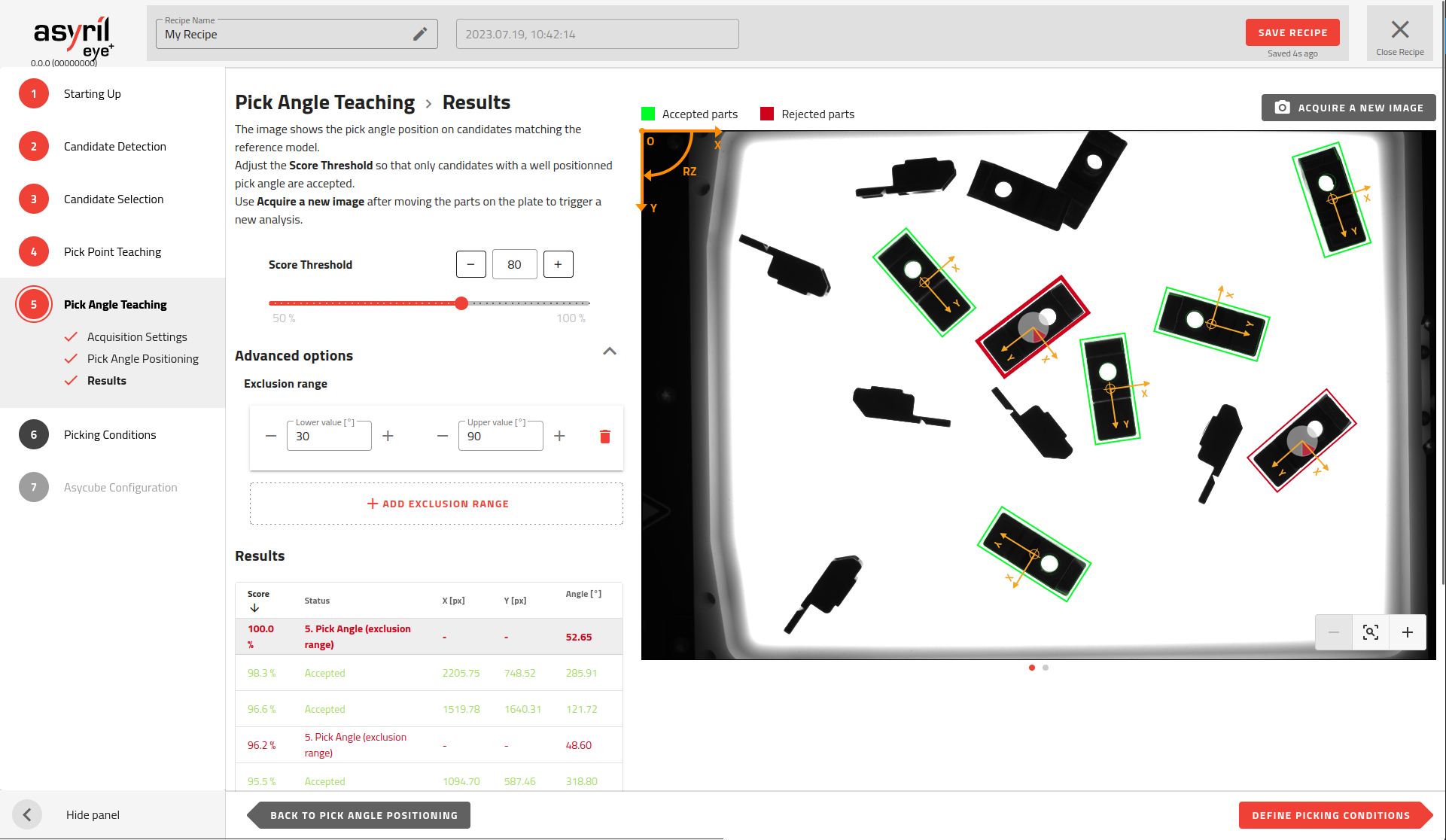
高度なオプションは、「高度なオプション」のタイトルの右側のマークをクリックすると表示されます。
重要
レシピウィザードでは、角度は画像の左上の座標系で定義された視覚参照フレームで表現されます。しかし自動運転中は、EYE+ は ハンドアイキャリブレーション によって計算されたロボットフレームの角度を返します。