警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .5.3 結果
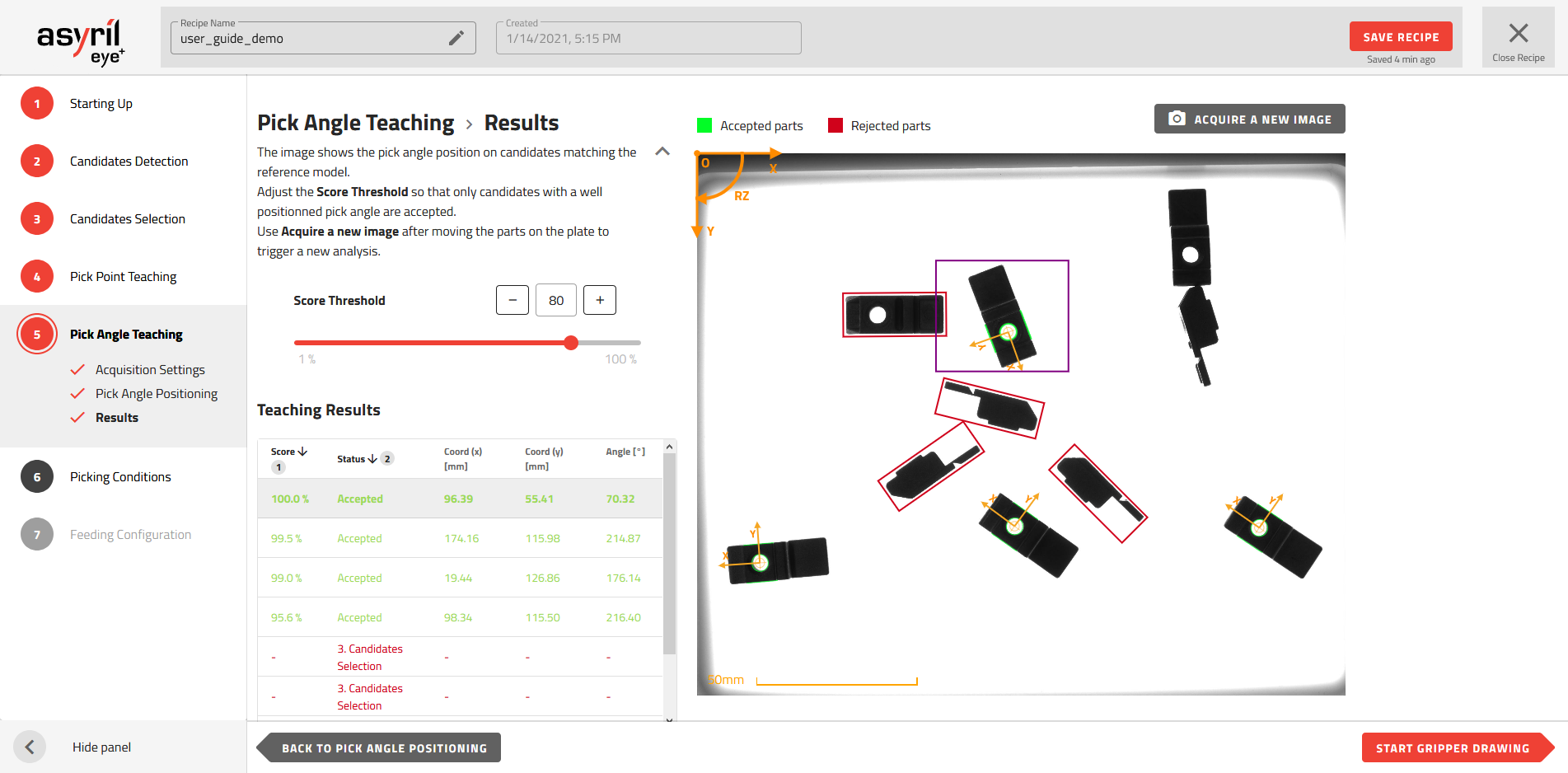
図 110 ピック角度ティーチング - 結果
次に、ピックポイントの位置と残されたフィーチャーから得られた参照モデルが、すべての良い候補のフィーチャーと比較されます。参照モデルのフィーチャーと候補から検出されるフィーチャーとが、可能な限り一致するまで参照モデルを回転させます。
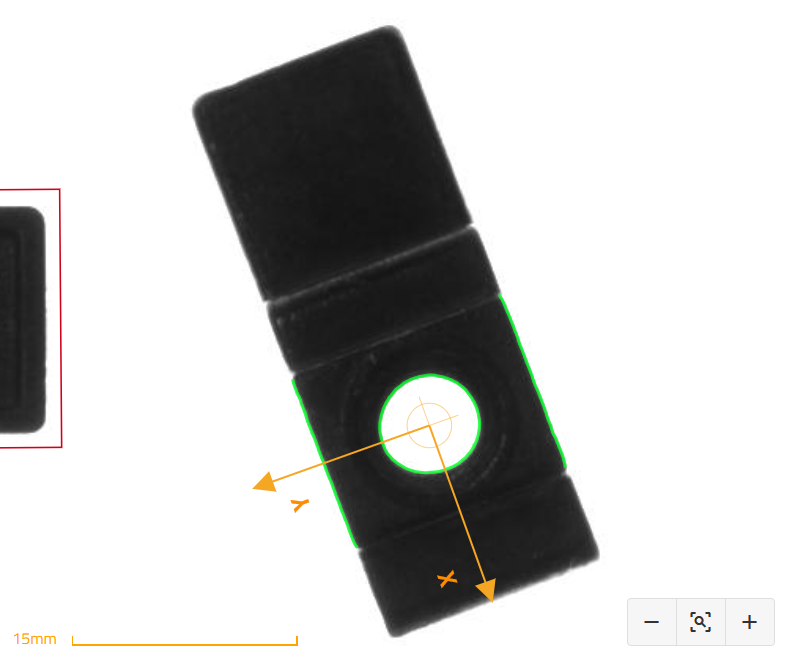
図 111 ピッキング角度のティーチング結果-ある部品の拡大
ヒント
手動でAsycube上で部品を移動させてから「新しい画像を取得」ボタンを押すと、ピック角度が常に良好に検出されているかどうかを確認することができます。
スコアは、参照モデルと候補の間の一致率を表します。スコア100%は完全一致を意味します。
ヒント
結果の表では、スコアの数値順に部品を並べ替えることができ、しきい値よりも高いスコアを持つすべての部品が正確に検出されているかどうかを簡単に確認することができます(すなわち、ピック角度が正確な部品)。しきい値を調整して、正確に検出された部品のみが受け入れられるようにします(緑の四角形で囲まれます)。