警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .2. 評価運転
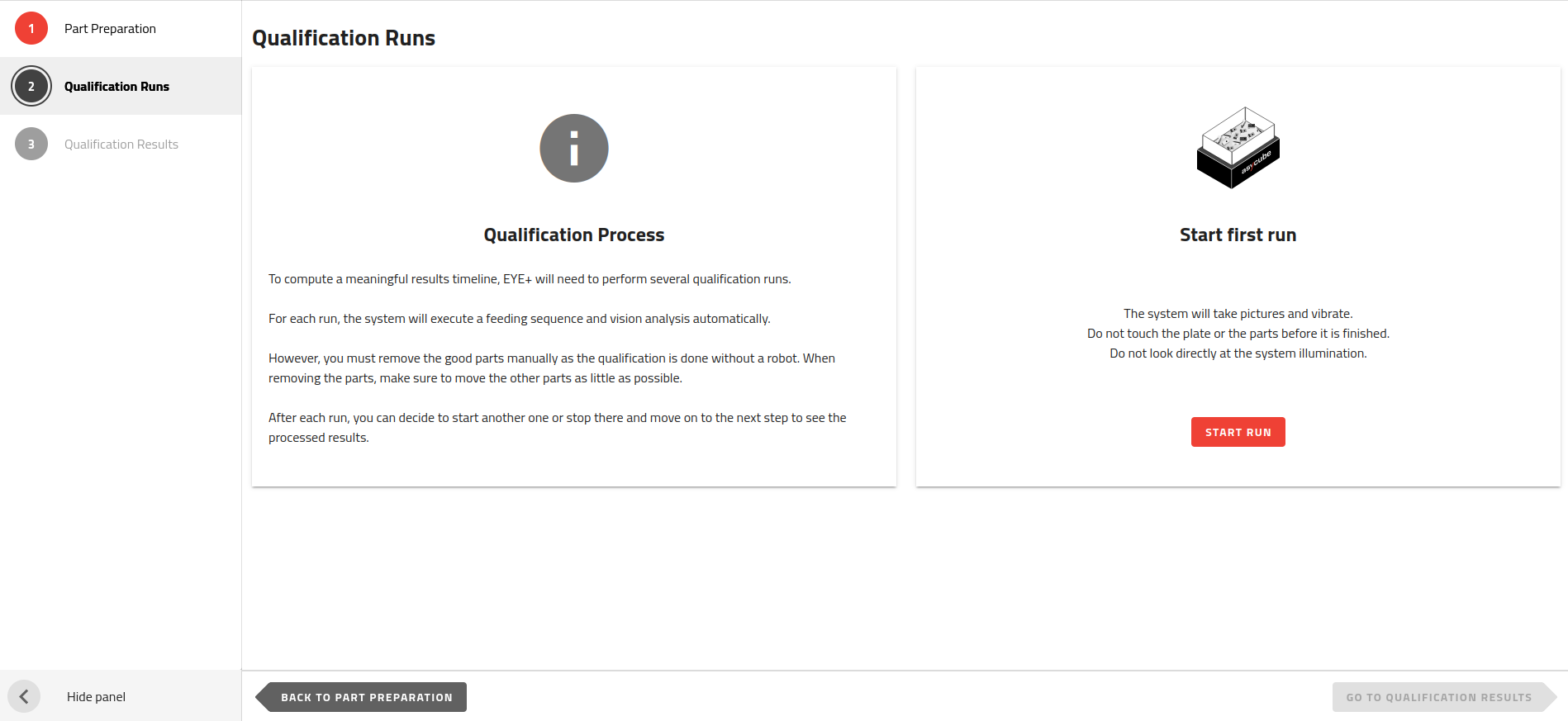
図 153 1回目の運転開始
ここでは、評価プロセスを初めてスタートします。この運転(ラン)では、システムは1回目の画像を取得してから、振動シーケンスをトリガーし、さらに次の画像を取得します。これ以降の運転においては、1回目の画像は必要ありません。各運転が完了した後、次の運転を開始するか、プロセス全体を終了するかを選択できます。
システムは、運転ごとに、検出した良い部品数(画面に表示される)や、システムが実行するすべての動作の実行タイミング(振動時間、視覚分析...)などの情報を収集します。
注釈
実行回数が多ければ多いほど、より正確なデータが得られます。少なくとも10回(最大50回)は実行することをお勧めします。これにより、検出される部品の総数が統計的に十分な数になり、結果が意味のあるものになります。
重要
運転終了後には、正確な結果を得るために、他の部品をできるだけ動かさずに、良い部品を手で取り除くことを忘れないでください。
システムが運転の実行を完了すると、次のページが表示されます。
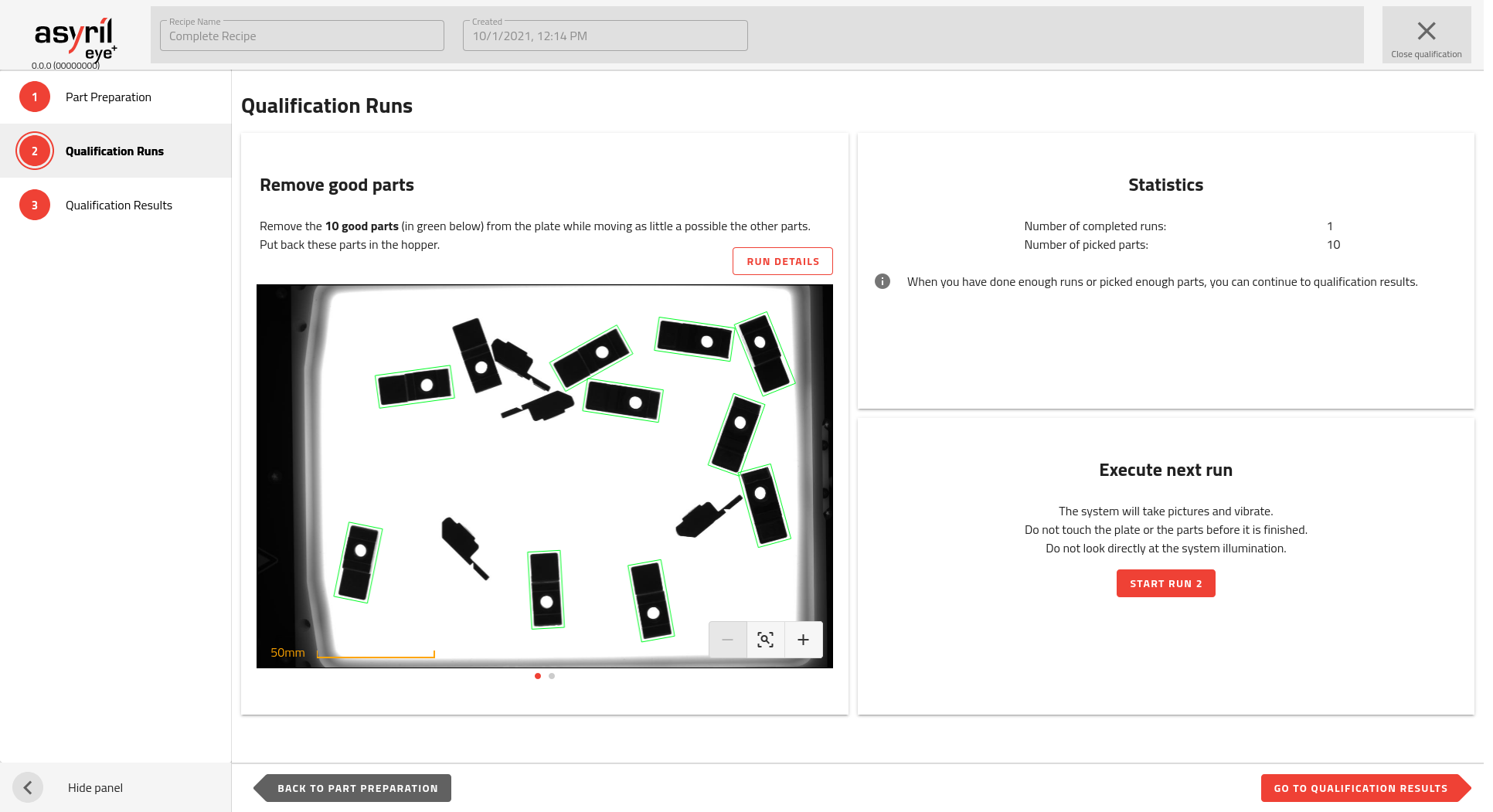
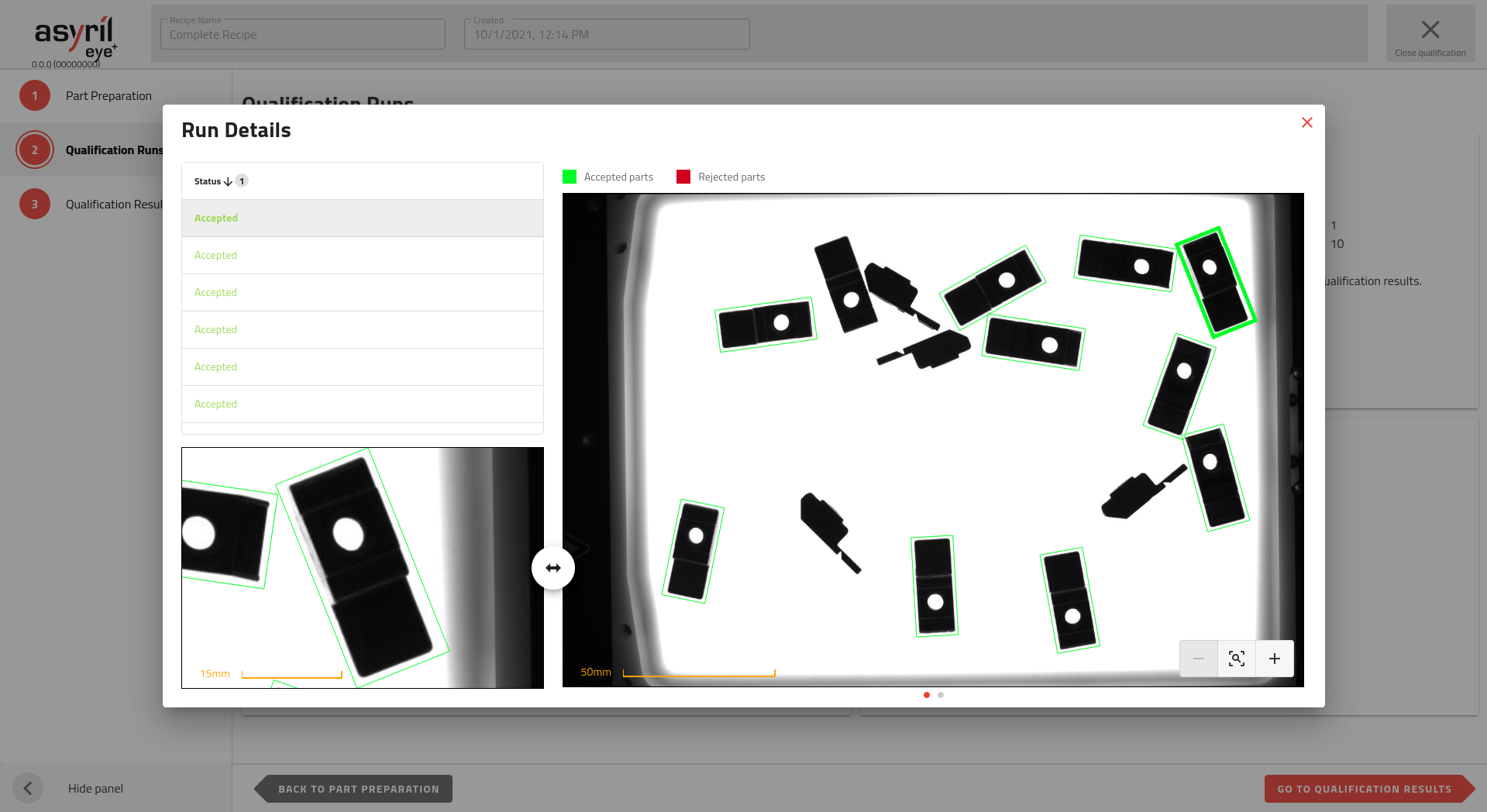
図 154 現在の運転結果
左側には、ビジョン解析の結果(複数の画像 + 適当品数とバウンディングボックス)が表示されています。右側には、現在の評価プロセスに関する統計データ(完了したすべての動作と、見つかった適当品の総数)が表示されます。ここでは、必要に応じて別の評価運転を開始することもできます。