Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Image after send
Le paramètre image_after_send est utilisé pour automatiser un force_take_image avant chaque get_part ou prepare_part.
Remarque
Le scénario à la Fig. 202 a un comportement presque similaire au scénario de droite à la Fig. 200.
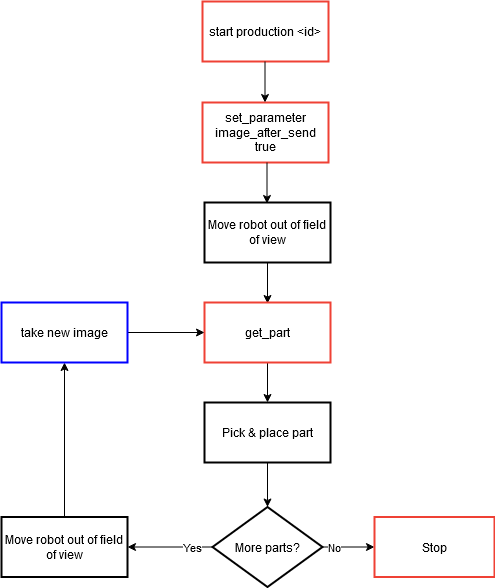
Fig. 202 scénario image_after_send
[set_parameter image_after_send true]: définissez le paramètre image_after_send comme true.
[Déplacer le robot hors du champ de vue]: Avant d’appeler la commande get_part, vous devez vous assurer que rien n’obstrue la vue de la caméra.
[get_part]: Appelez la commande get_part, soit elle fera vibrer l’Asycube et prendra une photo, soit elle vous enverra directement les coordonnées d’une pièce.
[Prélever & placer la pièce]: Prélevez et placez la pièce. Lorsque la pièce est prélevée ou placée, ou lors d’un déplacement du robot, celui-ci touche l’Asycube et fait bouger les autres pièces.
[Déplacer le robot hors du champ de vue]: Avant d’appeler la commande get_part, vous devez vous assurer que rien n’obstrue la vue de la caméra.
[Acquérir une nouvelle image]: EYE+ génère automatiquement une nouvelle image avant la commande get_part en réponse au paramètre image_after_send défini comme true. Ceci assure que les coordonnées des pièces sont correctes.
Recommencez à partir de l’étape 1. Le cycle s’arrête lorsque EYE+ reçoit la commande stop production.