Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .2.2 Résultats
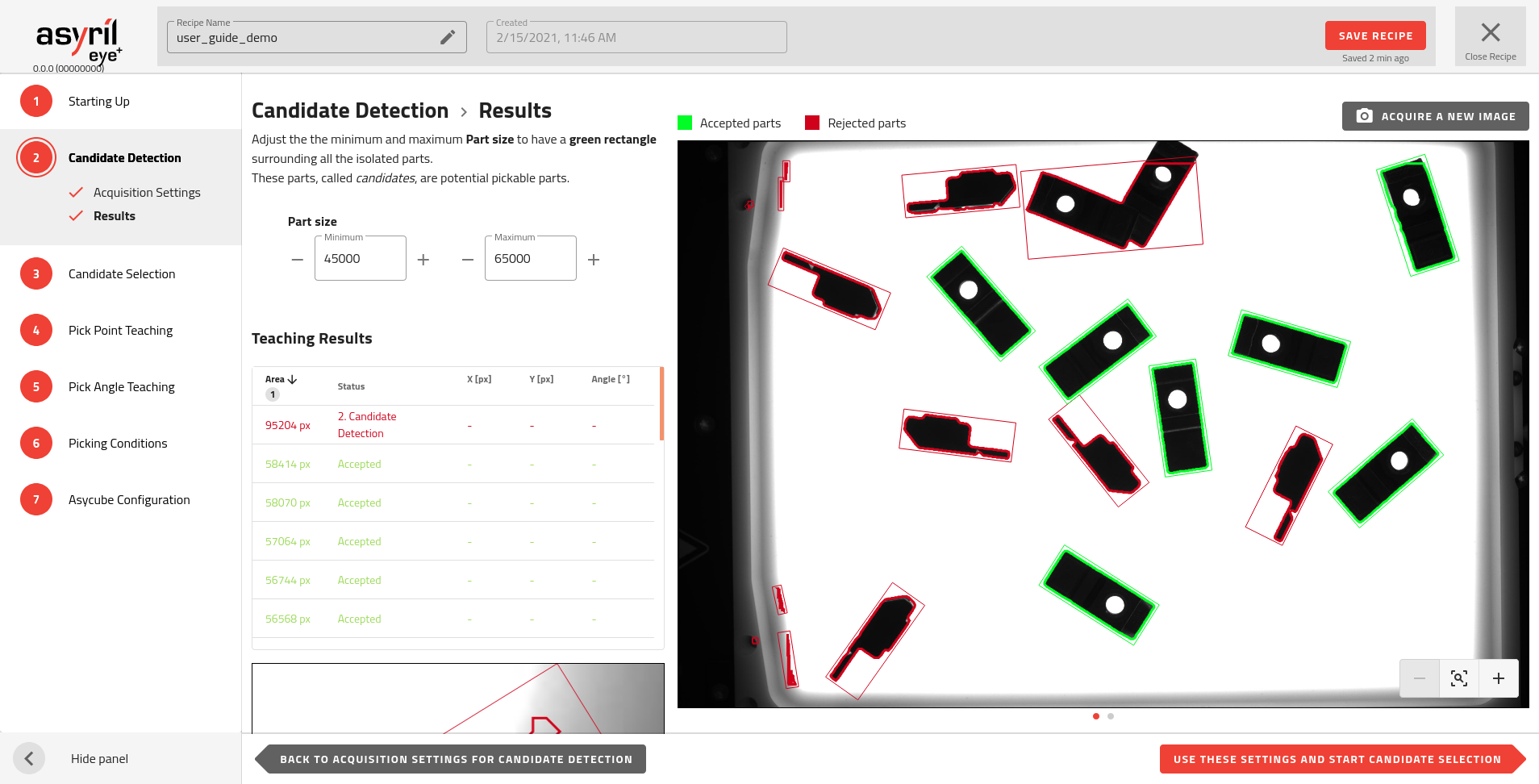
Fig. 82 Détection des candidats - Résultats
Tous les contours détectés par l’algorithme peuvent maintenant être filtrés en fonction de leur surface. Vous devez définir quelle surface (c’est-à-dire quelle taille de pièce) est considérée comme bonne en ajustant les valeurs minimale et maximale. Selon la configuration de la caméra, ces valeurs sont à indiquer soit en unité calibrée soit en pixels. Tous les contours dont la surface est comprise dans cette plage seront considérés comme des candidats pour les étapes suivantes et les autres seront rejetés.
Important
Si une pièce n’est pas entourée d’un rectangle vert à la fin de cette étape, elle sera rejetée pour toutes les étapes suivantes, ce qui signifie qu’elle ne sera pas prélevée par le robot avant qu’une vibration ne soit exécutée pour changer sa position ou son orientation.
Conseil
Vous pouvez déplacer manuellement les pièces sur la plateforme, puis appuyer sur le bouton « Acquérir une nouvelle image » pour analyser une nouvelle image et vérifier si la détection des candidats fonctionne bien.
Remarque
Si la pièce se trouve un peu en dehors de la région d’intérêt (ROI), les contours détectés de la pièce sont coupées comme indiqué à la Fig. 83. Les cadres englobants peuvent avoir différentes tailles pour cette raison. Cette pièce peut toujours être utilisée pour les étapes suivantes, mais vous devez être conscient que du point de vue du système, la pièce est coupée sur le côté.
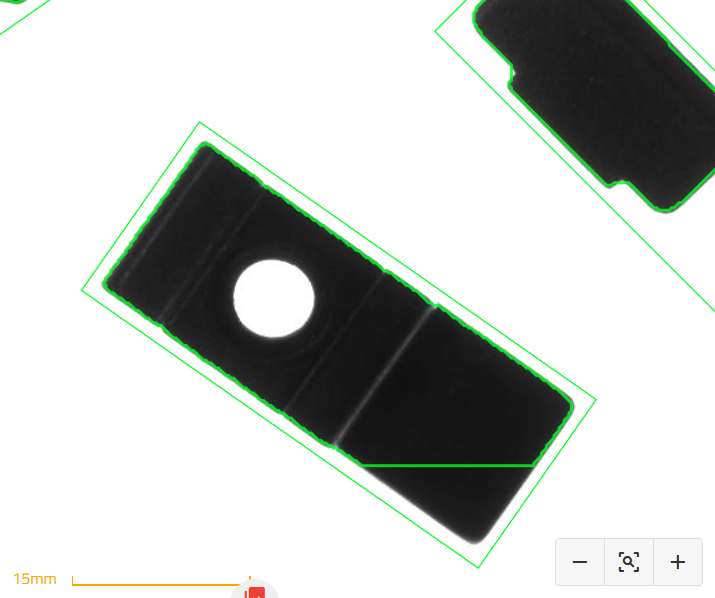
Fig. 83 La pièce est coupée car elle est située un peu en dehors de la ROI
La taille de la pièce est trop petite ou trop grande
Trop petite : Risque de détecter des petits débris ou des ombres.
Trop grande : Risque de détecter un groupe de pièces comme une seule pièce.
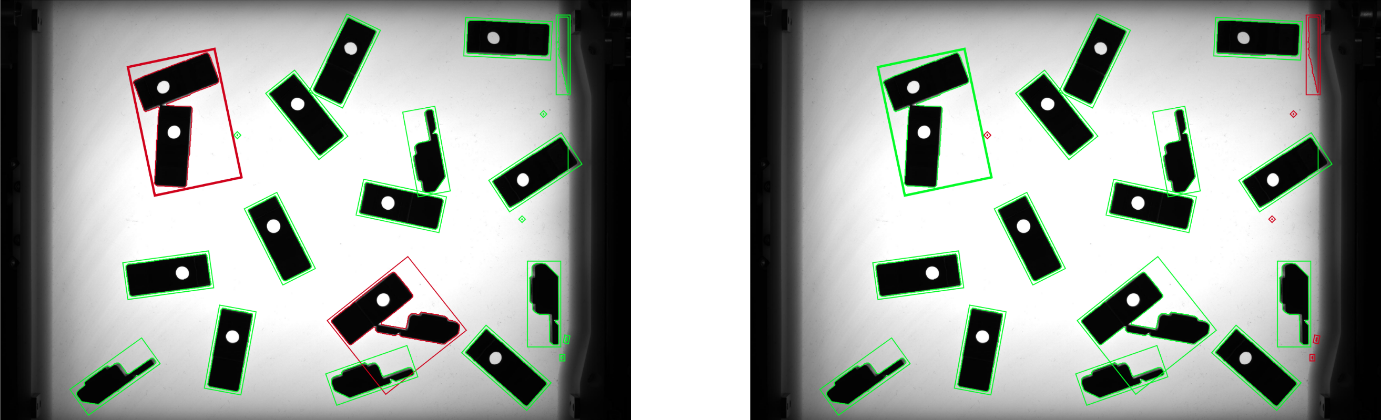
Fig. 84 Taille de la pièce : trop petite (à gauche), trop grande (à droite) [Rétroéclairage - 6ms]
Fourchette de taille de la pièce trop restreinte ou trop large
Trop restreinte : La détection de pièces peut ne pas être assez robuste pour détecter une pièce dans différentes positions sur l’image (légère variation de la surface de la pièce vue par la caméra). Le risque est de rejeter une pièce uniquement parce que sa surface est légèrement en dehors de la fourchette souhaitée.
Trop large : Risque de détecter trop de tailles de pièces différentes et de détecter des groupes de pièces comme une seule pièce.
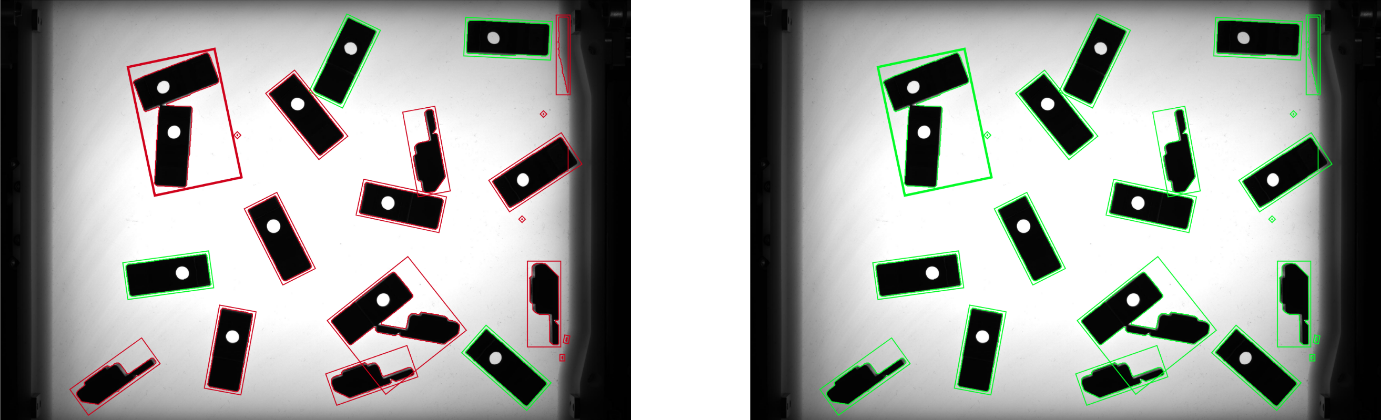
Fig. 85 La fourchettes de taille de la pièce est trop restreinte (à gauche) ou trop large (à droite) [Rétroéclairage - 6ms]