警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .2.1 画像取得設定
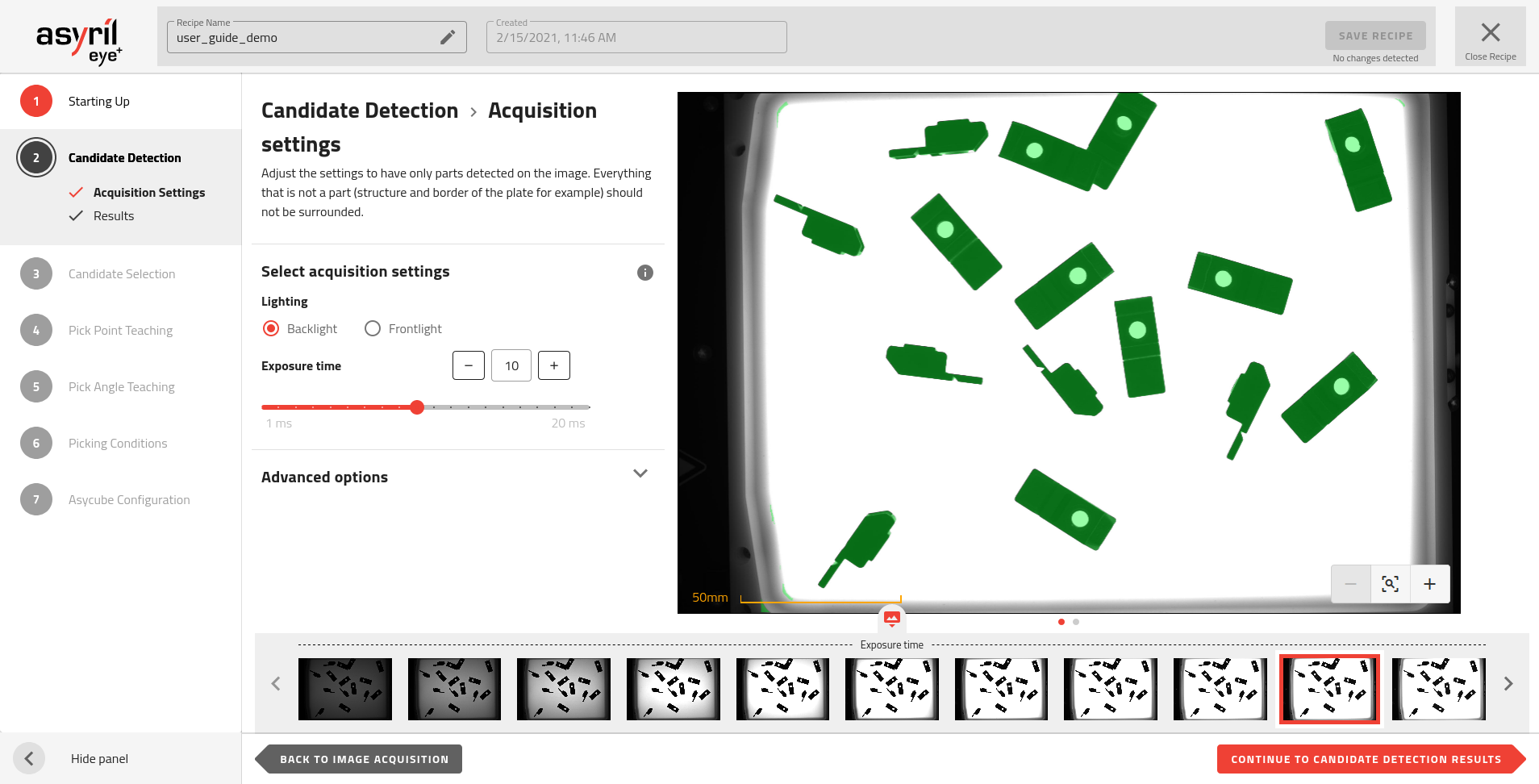
図 53 候補の選定 - 画像取得設定
画像取得設定の選択
照明
部品と、使用する自動運転用プレートの種類とに合わせて、照明の種類を選択しなければなりません。部品の検出と不要な要素の除去が、照明の選択によって可能になるようにしてください。
良い部品を検出するためには、照明により部品のエッジを強調する必要があります。EYE+ は、部品と自動運転用プレートの間のコントラストが高い場合には、部品のエッジを検出します。
図 54 では、バックライトを使う画像がよりコントラストが高いことがわかります。このため、バックライト画像を候補検出ステップで利用します。この画像では部品の向きを区別することができないので、 候補選択 のステップではフロントライトによる画像を使用します。
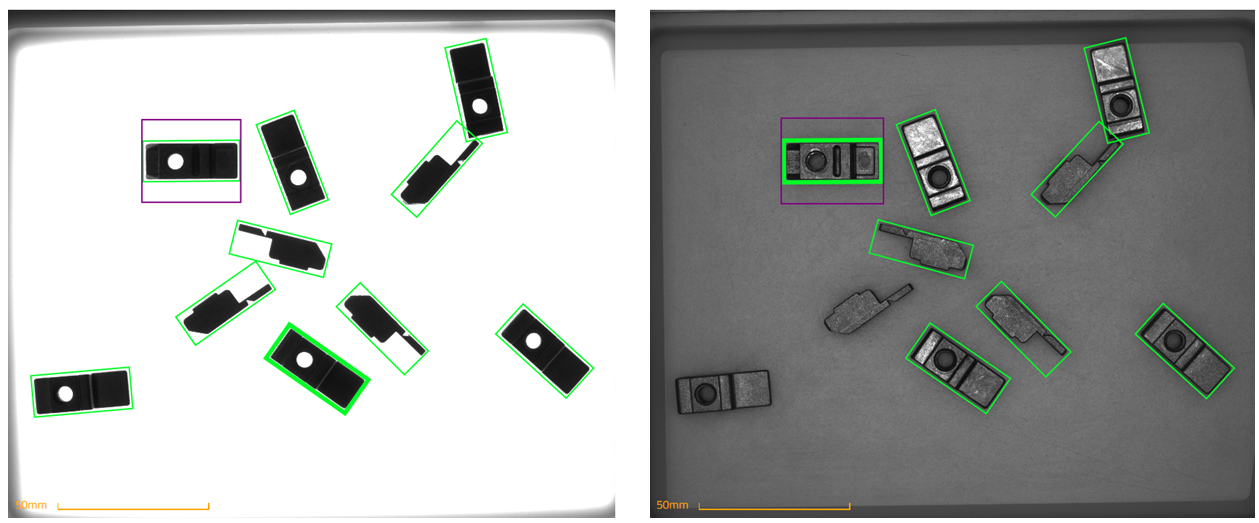
図 54 バックライト13ms(左)とフロントライト14ms(右)で最高の候補を検出します
バックライト
バックライトを使用する方法が、ほとんどの場合に部品の検出に適します。このタイプの照明では、部品の輪郭が強調されシルエットのように見えるため、不透明な部品とAsycubeプレートの半透明の背景との間でコントラストが強くなります。
フロントライト
条件によっては、候補の検出のステップでフロントライトを使用すると良い場合があります:
透明な部品: 部品が透明な場合、フロントライトを使用して、部品に入射光を反射させコントラストを高くします。EYE+ の検出アルゴリズムにより、部品の反射と背景とのコントラストが十分に高ければ、その部品を検出することができます。
黒の自動運転用プレート: 部品とAsycubeのプレートとのコントラストを高めるために、場合によっては、フロントライトと黒のプレートとの組み合わせで使用することが有効です。
注
標準的な条件でフロントライトを使用すると、バックライトには存在しなかった多くの望ましくない問題が出現する可能性があります。また、部品のサイズを使うことにより望む候補をフィルタリングすることが、より困難になります。
露光時間
露光時間とは、画像を取得する際にカメラが受光している時間のことです。露光時間が長いほど画像が明るくなります。
露光時間の増減は、部品とプレートのコントラストに影響を与えます。部品を検出するために最適な露光時間を見つける必要があります。
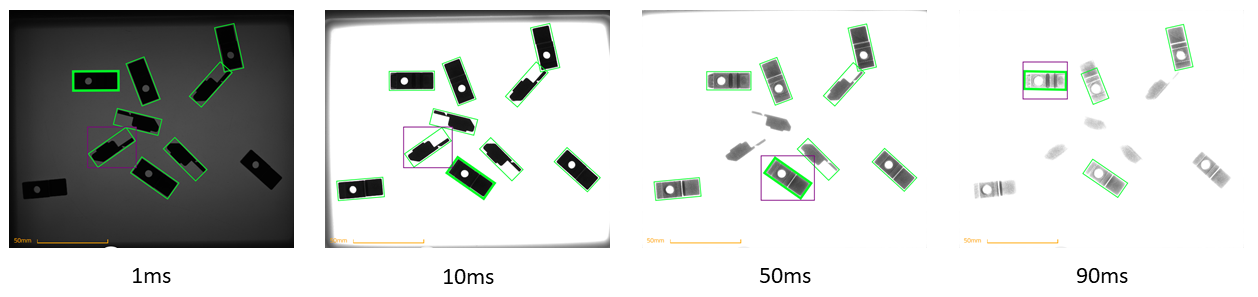
図 56 バックライトを使った露光時間の異なる画像
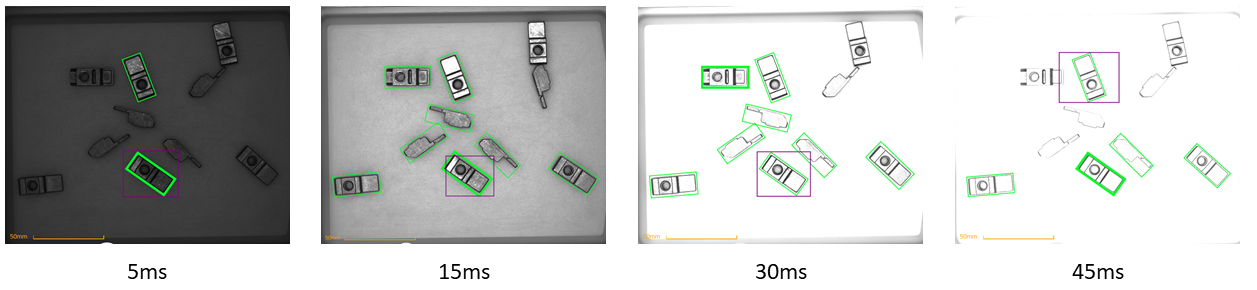
図 57 フロントライトを使った露光時間の異なる画像
露光時間の短かすぎ
EYE+ の検出アルゴリズムでは、部品と背景の違いを判別できない場合、部品を検出できないことがあります。部品がプレートの境界に近い場合、特にこのような現象が起きます。
EYE+ 検出アルゴリズムでは、プレートの形状や影のような望ましくない要素を検出してしまう場合があります。
露光時間の長すぎ
露出オーバーの画像は、部品のエッジを食い込んでしまう可能性があります。その場合、部品のサイズは画像内でどの位置にあるかによって異なってしまう可能性があります。部品サイズが小さい場合は、検出が不安定になります。
高度なオプション
高度なオプションでは、デフォルトの検出設定では十分な結果が得られない場合に、追加で調整できる設定が用意されています。たとえば、構造化プレートを使用している場合やプレートの表面状態が誤って部品として検出される場合などです。
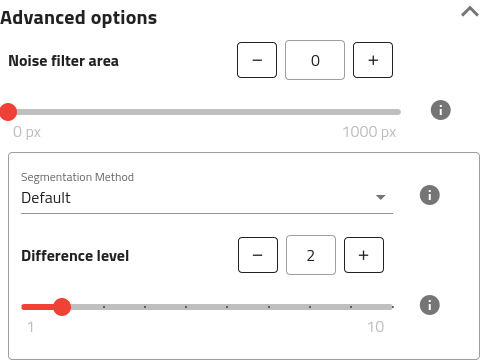
図 58 高度なオプションは、「高度なオプション」のタイトルの右側のマークをクリックすると表示されます。
重要
セグメンテーション画像 を見る時に、すべての部品が白く見え、残りのエリアが黒く表示されているのが理想的です。このセグメンテーション画像は後で他の部品との接触をチェックするために使用されますので、画像に表示されるノイズをできるだけ少なくして、現物の部品を正常に検出することが重要です。
ノイズフィルターエリア
このパラメータにより定義された領域よりも小さいものをすべて除去することで、ノイズをフィルタリングすることができます。この領域はカメラの設定に応じて、 キャリブレートされた単位 により、または、ピクセル単位で表されます。
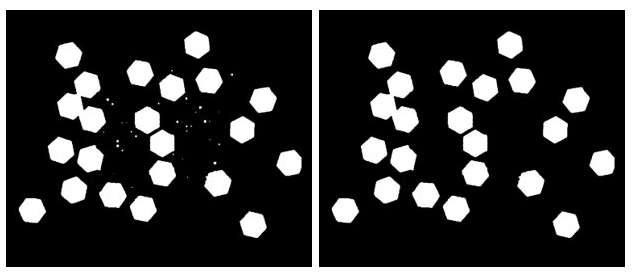
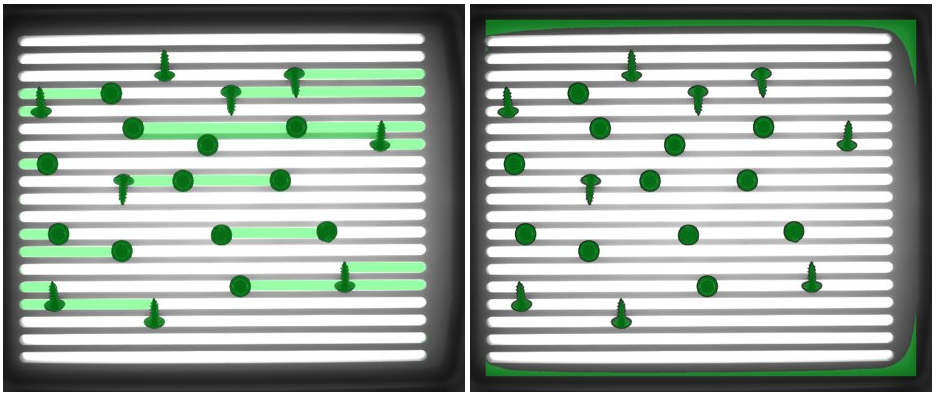
図 59 ノイズフィルターの面積を変えた場合のセグメンテーション画像。左:0px、右:450px。
ヒント
セグメンテーション画像上では、画像にノイズがあるかどうかを確認しやすくなります。画像の下にあるナビゲーションボタンをクリックすると、この画像に変更することができます。
セグメント化の方法
セグメンテーション は、複数の方法で行うことができます。現在、EYE+ は2つの方法をサポートしています。
デフォルト
ハードしきい値
デフォルト
最適化されたセグメンテーション手法により、パラメータを調整することなく、ほとんどの部品に対応することができます。
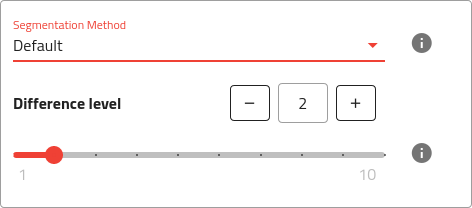
図 60 利用可能な設定によるデフォルトのセグメンテーション方法。
差異レベル
差異レベルとは、あるピクセルとその隣のピクセルとの間で、隣のピクセルが同じ部品に属するとみなすために、最大どれだけの強度差を許すかの値です。デフォルトの差異レベルは2です。この値を大きくすると、部品のエッジがシャープになりますが、輪郭が損なわれることもあります。
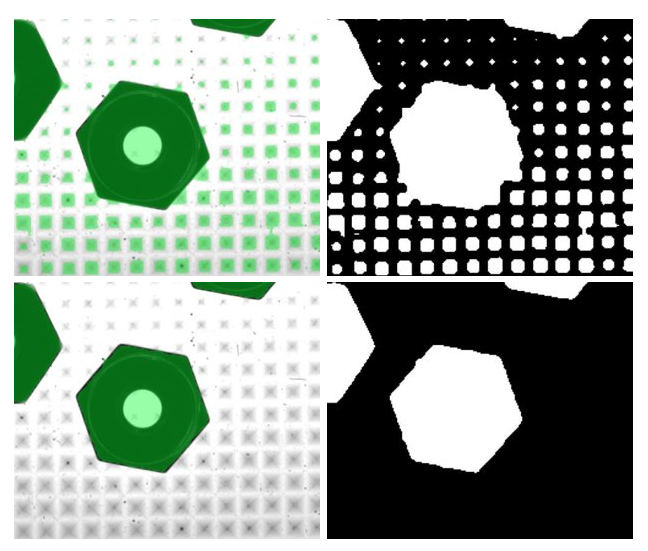
図 61 異なる差異レベル(上:差異レベル2、下:差異レベル10)を用いたピラミッド型プレート上の部品のクローズアップ(左:重ね合わせた結果、右:セグメンテーション画像)。
ヒント
この値を変更する際には、境界線に近い部分が消えていないか、特に注意してください。そのような場合は、露光時間を長くしたり、差異レベルを下げたりしてみてください。
ハードしきい値
この方法では、定義されたしきい値を適用して、部品をプレートや背景と区別します。これは、部品の強度レベルが背景の強度レベルと大きく異なる画像に対して有効です。
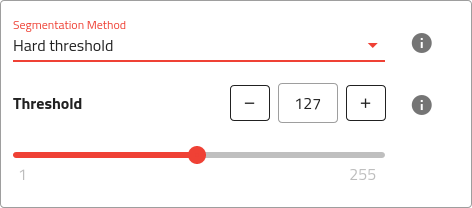
図 62 ハードしきい値セグメンテーション法で利用可能な設定。
警告
この方法は、固定のしきい値を使用するため、画像の明るさの変化に敏感に反応します。この方法を使用する際には、周囲の光が画像に対して大きな影響を与えないことを確認してください。
注
この方法では、特にプレートの境界付近では、背景の一部が潜在的な候補として検出される(セグメンテーション画像では白)可能性が避けられません。これはこの方法の限界です。
しきい値
強度のしきい値(1~255)。部品だけが検出されるようにしきい値を調整します。
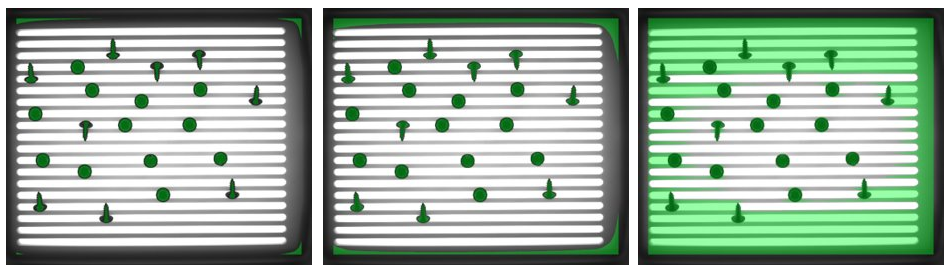
図 64 しきい値を変えた場合の結果。左:しきい値が低すぎる(部品形状が浸食されている)、中央:良好なしきい値、右:しきい値が高すぎる(部品が背景から分離されていない)。