警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .ホーム
ホーム ページは、EYE+ Studio ( 図 43) にアクセスした時に最初に表示されるページです。これをダッシュボードと呼び、システムの情報を提供します。
システムが自動運転中でない場合は、表示される項目は EYE+ のシステム状態だけです。各状態の説明については EYE+ 状態 を参照してください。
図 43 システム状態が 準備完 でない場合のホーム
自動運転のダッシュボード
EYE+ の状態が 自動運転 の場合、ダッシュボード( 図 44)は現状の自動運転の情報を表示します。
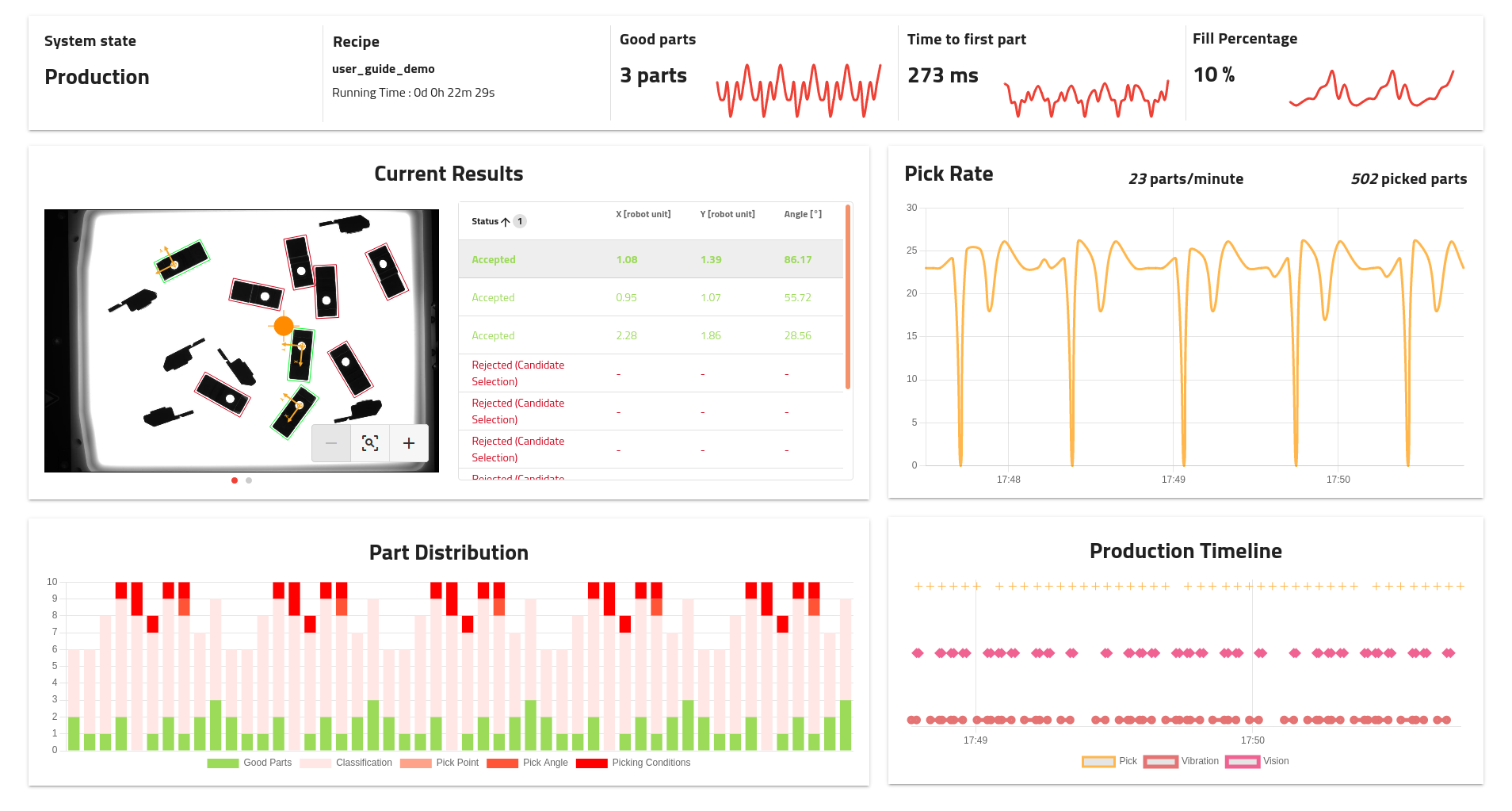
図 44 自動運転のダッシュボード
注
情報はリアルタイムで表示されますが、EYE+コントローラに保存されることはありません。自動運転を停止した時、直前のデータは残りますがインタフェースのリフレッシュ後には残っていません。
ヒント
右下の小さなボタンをクリックすると、インターフェースがフルスクリーンモードで表示され、ダッシュボード全体をHD画面で見ることができます。
トップエリア

図 45 自動運転ダッシュボード:トップエリア
トップエリアには、現在の自動運転に関するグローバルな情報が表示され、5つのエリアに分かれています。
システムの状態 :現在の EYE+ の状態。ダッシュボードのフル機能が表示される場合は、 自動運転 中です。
レシピ : 現在自動運転に使われているレシピの名前、自動運転開始からの経過時間を表示。
良い部品: 直近の画像解析で検出された良い部品の数。グラフは直近の50回のこの個数の変化を表示します。
最初の部品までの時間 :直近の画像取得時に最初の部品を見つけるためにかかった時間。グラフは直近の50回のこの値の変化を示します。
充填率 :直近の画像解析で測定された充填率。グラフは、直近の50回のこの値の変化を示しています。
現在の結果
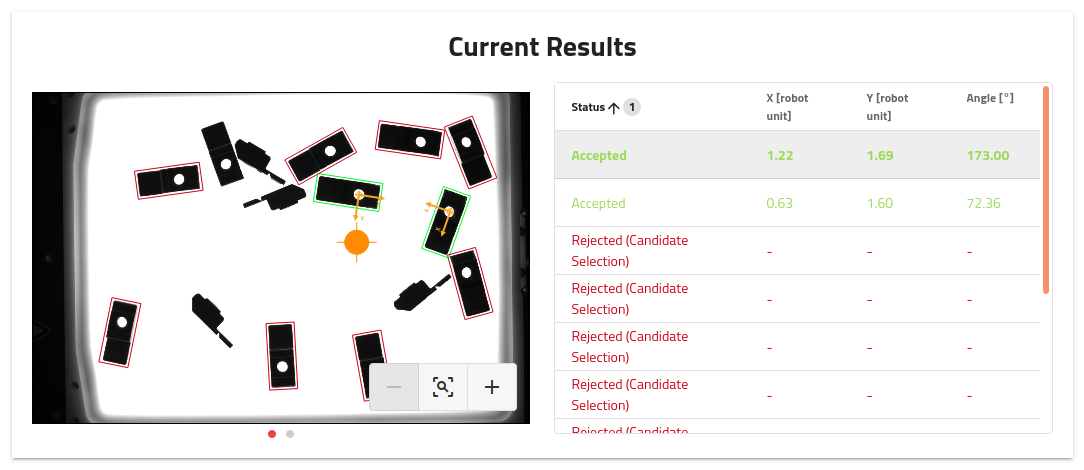
図 46 自動運転ダッシュボード:現在の結果
直近の分析の結果を表示します。画像の下にある小さなナビゲーションドットを使って、表示する画像を変更することができます。
右側には、候補のリストとそのステータス(受け入れ、拒否)、位置座標(ロボット単位による)、角度が表示されます。表中の線をクリックして部品を選択すると、左の画像の中の該当する部品がハイライト表示されます。
ヒント
画像領域を右クリックすると、元のフル解像度の画像、または、オーバーレイ付きの画像のいずれかをエクスポートすることができます。
ピック速度
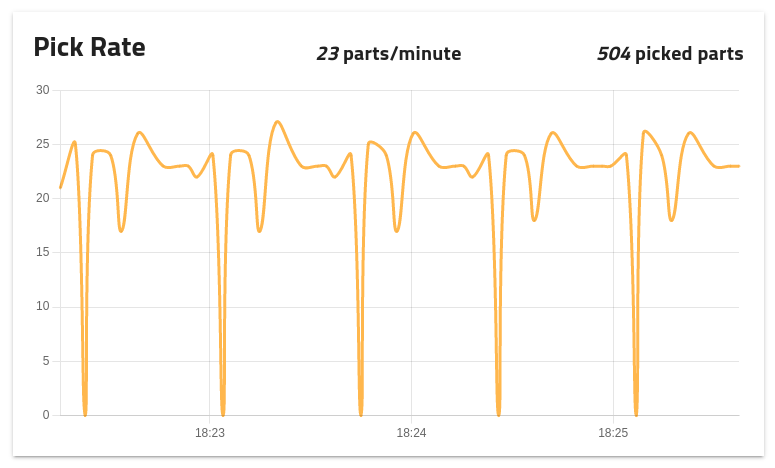
図 47 自動運転ダッシュボード:ピック速度
このグラフは、1分間にリクエストされた get_part の数に基づいて、ピック速度の推定値を表示します。
上段には、実際のピック速度と、自動運転開始からのピック部品の総部品数が表示されます。
部品の分布
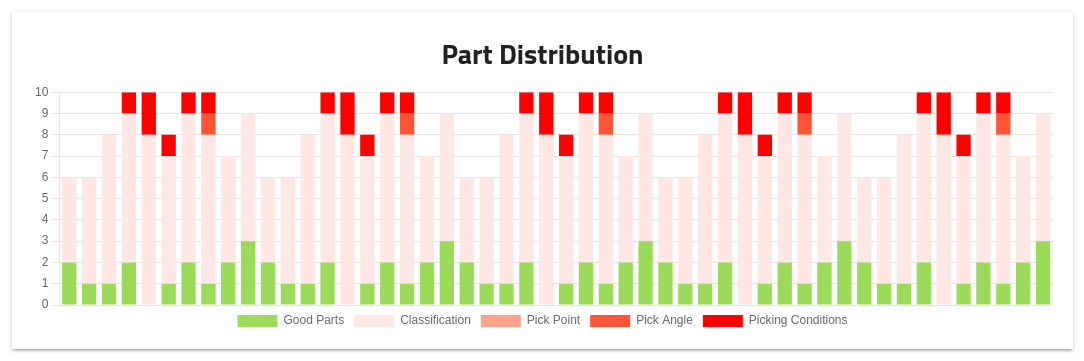
図 48 自動運転ダッシュボード:部品の分布
このグラフには、直近50回の実行での受け付け部品と拒否の部品の個数の分布を表示します。
注
候補検出で検出されなかった部品があるため、部品の総数はプラットフォーム上の部品数とは必ずしも一致しません。
自動運転時タイムライン
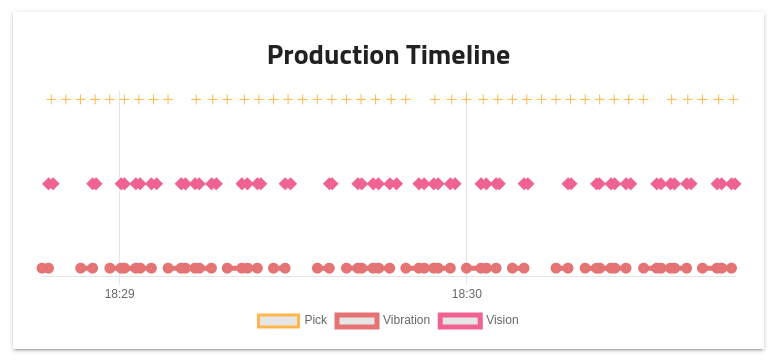
図 49 自動運転ダッシュボード:自動運転タイムライン
自動運転タイムラインは,自動運転の最後の 2 分間に発生した以前のイベントを示しています。下のラインは振動シーケンスを、中央のラインはビジョン分析を、上のラインはロボットのピック( get_part への応答)を表します。
注
独自のダッシュボードを作成して、 EYE+ Studio ダッシュボードの要素を組み合わせて表示したい場合は、 EYE+ Studio ダッシュボードの構築 を参照ください。