初める前に
クイックスタート
ハードウェア
EYE+ studio
構成
追加機能
サポート
付録
警告
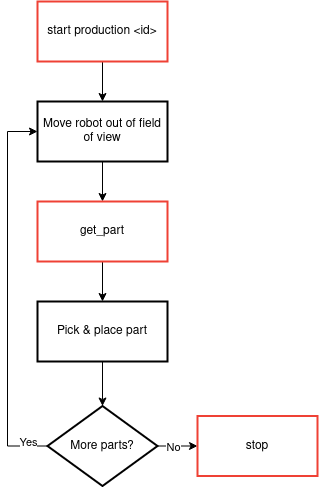
get_part ( 図 240) コマンドを使うと、自動運転サイクルを簡単に実行できます。
注釈
このシンプルなシナリオでは、サイクルタイムは最適化できませんが、構築自体は複雑ではありません。
図 240 get_part を使用する自動運転のシナリオ
[Move robot out of field of view] get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
[get_part] get_part コマンドが、アジキューブを振動させて画像を取得するか、部品の座標値を直接送信します。
[Pick & place part] ピック & プレースを行います。
手順1からやり直します。 EYE+ が 自動運転を停止する コマンドを受信するとサイクルが停止します。