警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .パーツモデルを切り替える
オプション①
モデル数(model_quantity) パラメータは、 EYE+ に特定のモデル( 1 または 2 ) の1つまたは複数の部品を探すように指示するために使用されます。これは、 EYE+ が画像を取得するたびに、画像上で特定のモデルの少なくとも <n> 個の部品を探すことを意味します。それらの部品が見つからない場合、座標は送信されず、 EYE+ は振動を開始して新しい画像を取得し、その <n> 個の部品を取得するまで続けます。
このパラメータは、コマンド get_part および prepare_part の動作に影響を与えます。
次に、 モデル 1 の部品を取得し、次にモデル 2 タイプの部品を取得する、というように、常に交互に部品を取得する方法のシナリオについて説明します。
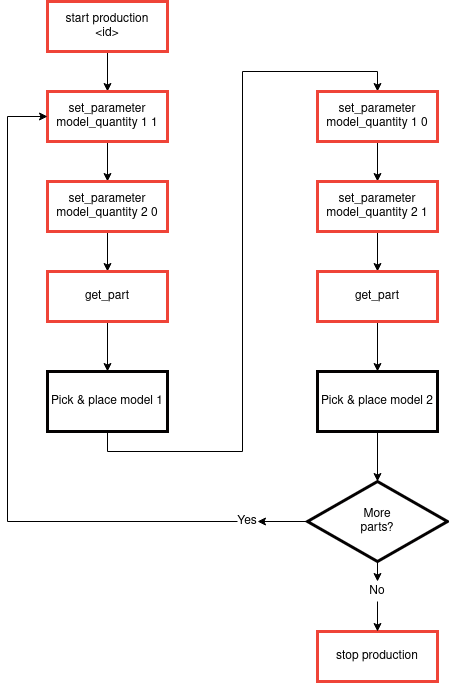
図 251 交互にパーツモデルを交替する自動運転のシナリオ
[set_parameter model_quantity 1 1] は、 モデル数(model_quantity) パラメータの、
1に対して値1を設定します。[set_parameter model_quantity 2 0] は、 モデル数(model_quantity) パラメータの
2に対して値0を設定します。[get_part] は、 get_part コマンドを呼び出し、アジキューブを振動させて画像を撮影するか、モデル
1の部品の座標を直接送信します。システムは要求を満たすためにモデル1の1つ以上の部品を見つけるまで、アジキューブの振動と画像解析を終了しません。2のための モデル数(model_quantity) が0に設定されているため、ここではパーツモデル2は返されません。[Pick & place part 1] は、 モデル
1のパーツをピック & プレースします。[set_parameter model_quantity 1 0] は、 モデル数(model_quantity) パラメータの
1に対して値0を設定します。[set_parameter model_quantity 2 1] は、 モデル数(model_quantity) パラメータ
2に対して値1を設定します。[get_part] は、 get_part コマンドを呼び出し、アジキューブを振動させて画像を撮影するか、モデル
2の部品の座標を直接送信します。システムは要求を満たすためにモデル2の1つ以上の部品を見つけるまで、アジキューブの振動と画像解析を終了しません。1のための モデル数(model_quantity) が0に設定されているため、ここではパーツモデル1は返されません。[Pick & place part 2] は、モデル
2のパーツをピック & プレースします。手順1からやり直します。 EYE+ が stop production コマンドを受信するとサイクルが停止します。
オプション②
厳密には最初に説明したオプションと同等ではありませんが、同様の結果を出すために使用することができる次のシナリオがあります。モデル 1 パーツ1個とモデル 2 のパーツ1個を交互にリクエsとする代わりに、今回は 1 と 2 の両方を同時にリクエストします。ここでは、システムが get_part が両方の部品を同じ応答で返すように確認します。つまり、少なくとも各モデルの1つの部品が同時にピックアップ可能であるということになります。
例えばこのオプションは、ロボットが2つのグリッパーを持っていて、操作を続けるために 1 と 2 の両方をピックしなければならない場合に便利です。
1 と 2 の両方が同時にピッキング可能であることを要求すると、フィードシーケンスの後に get_part を満たすことができる確率が下がり、アプリケーションのサイクルタイムが長くなります。
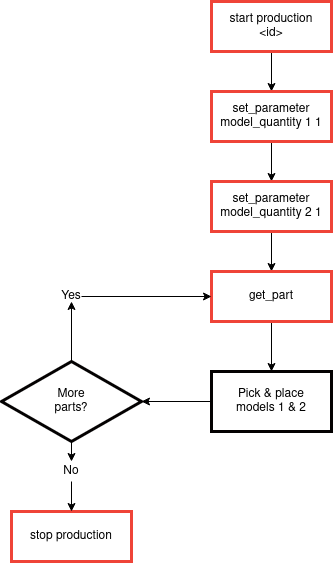
図 252 モデル 1 のパーツと モデル 2 のパーツを常に1個ずつ取る自動運転のシナリオ
[set_parameter model_quantity 1 1] は、 モデル数(model_quantity) パラメータの、
1に対して値1を設定します。[set_parameter model_quantity 2 1] は、 モデル数(model_quantity) パラメータ
2に対して値1を設定します。[get_part] は、 get_part コマンドを呼び出し、アジキューブを振動させて画像を取得するか、 モデル
1と モデル2のパーツ1個ずつの座標値を直接送信します。両方の部品が1個以上見つかり、要求を満足するまでは、アジキューブの振動や画像解析は終了しません。[Pick & place part 1 & 2]
1と モデル2のパーツをピック & プレースします。手順1をくり返します。 EYE+ が 自動運転を停止する コマンドを受信するとサイクルが停止します。