Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .2. Candidate Detection
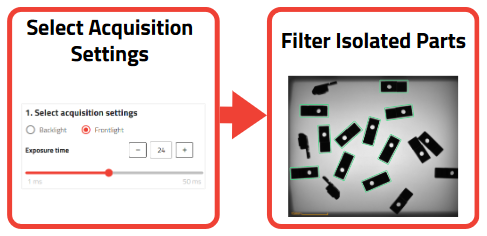
Fig. 46 Candidate Detection overview
The purpose of Candidate Detection is to detect candidates (i.e. potential good parts that are “candidates” for the next steps of the wizard) according to their size. The EYE+ detection algorithm filters out elements that are too small or too large in the image. Undesired part detection can be:
several parts in contact detected as one
platform debris
shapes or shadows of the production plate (e.g. production plate with grooves)
Tip
The candidate detection can even filter a part that has a wrong orientation if it is larger or smaller than the desired orientation of the part.
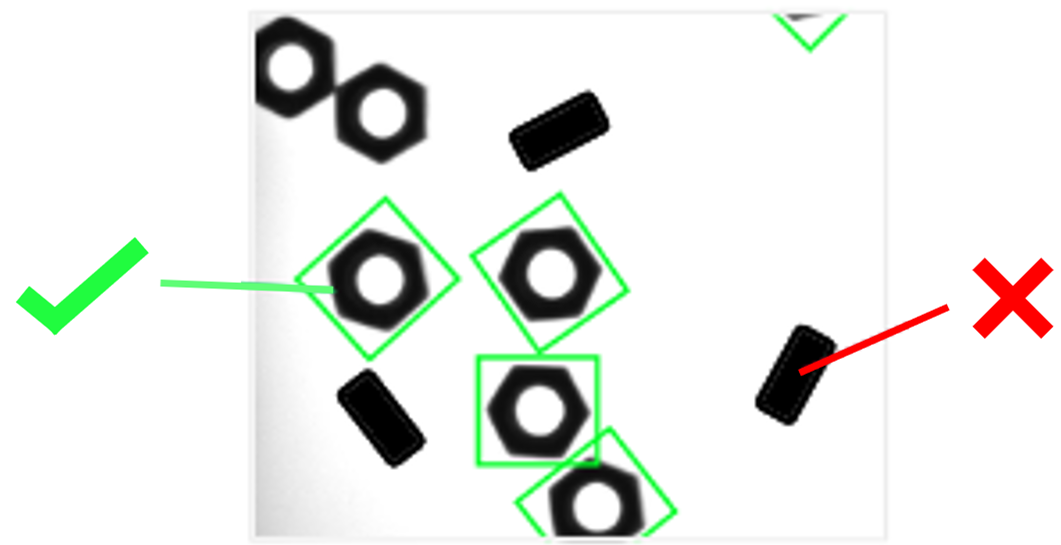
Fig. 47 The orientation of the parts is filtered by their size. Parts that are in the wrong orientation in this case are smaller in area, and are therefore filtered out.
At the end of this step, you should have as many isolated parts as possible surrounded by a green rectangle (called a bounding box) and as few as possible of the wrong size elements detected (dust, background element …)