Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Release Notes
Release notes provide information on the new features, improvements and bugs fixed on each plugin version.
If you want to update your product, download the latest plugin version here. Then, install it by following the steps presented in Plugin installation.
Version 1.0.1
Bug Fixes
Global variable EYE1Pos components
When the UR requests a part, EYE+ sends the coordinates EYE1Pos = p[X, Y, 0, 0, 0, RZ] (X, Y, and yaw). Previously, the last three positions of the of the global variable p[X, Y, Z, RX, RY, RZ], (RX = roll, RY = pitch, & RY = yaw) were described as a rotation vector with a predefined orientation of RX = 180°, RY = 0°, and RZ = the value sent by EYE+. The plugin then performed a transformation of the roll, pitch, and yaw coordinates into a rotation vector.
By transforming the coordinates into a rotation vector, it was not possible to retrieve the true RZ value. This was an issue if the robot configuration p[X,Y,0,180°,0,RZ] was not suitable for the application.
Now the the roll, pitch, and yaw (RX, RY, & RZ) are converted to radians with RX and RY needing to be manually set to 0 as shown below:
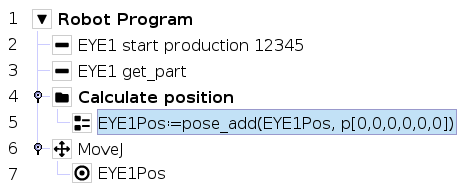
Fig. 200 Position correction before Move
Note
Refer to section EYE1Pos to get more information about the global variable EYE1Pos.
Main new features
Multi-tasking behavior
It is now possible to send two commands in parallel through the UR program. See the example below.
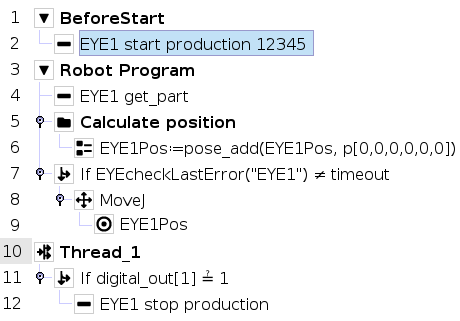
Fig. 201 Example of multithreading used to stop the production in reaction to a change in the DO[1] value