Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Robot
Access the robot configuration through and Robot.
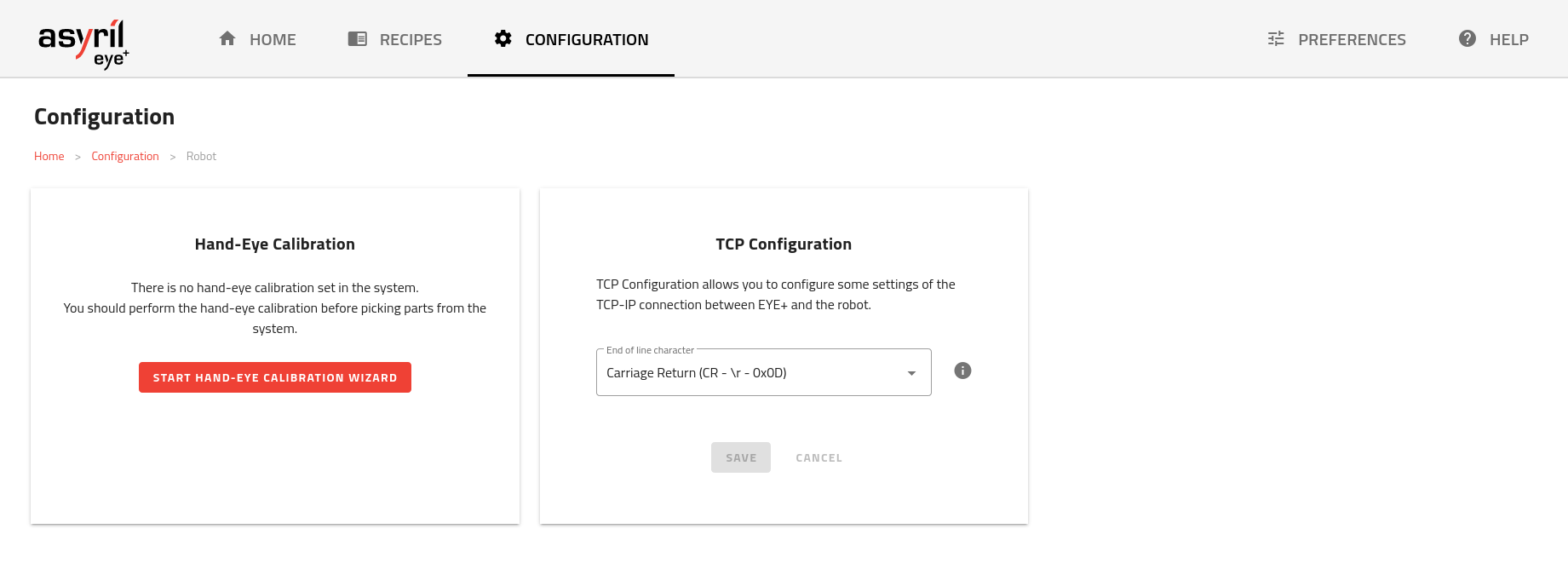
Fig. 164 Robot configuration interface
The robot configuration page consists of two sections:
Hand-eye calibration
The hand-eye calibration card informs you about the current state of the Hand-eye calibration wizard and allows you to open it.
Three variants of the interface are possible:
No hand-eye calibration performed (Fig. 165)
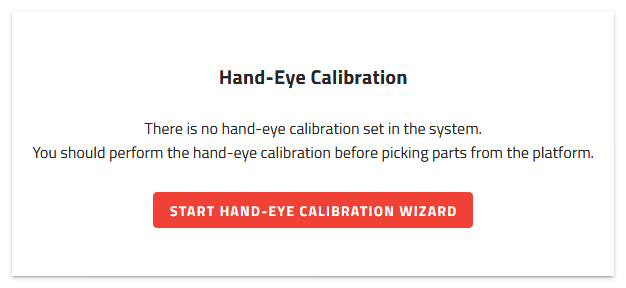
Fig. 165 No hand-eye calibration performed
Hand-eye calibration in progress (Fig. 166)
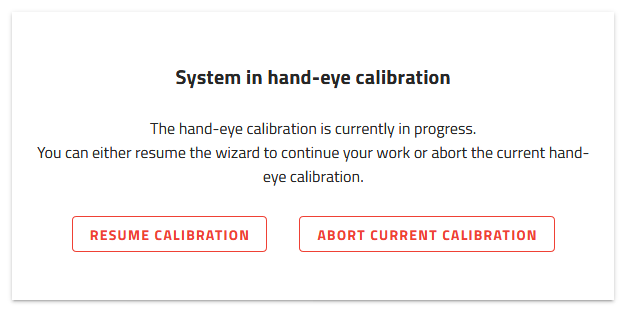
Fig. 166 Hand-eye calibration in progress
Hand-eye calibration already performed (Fig. 167)
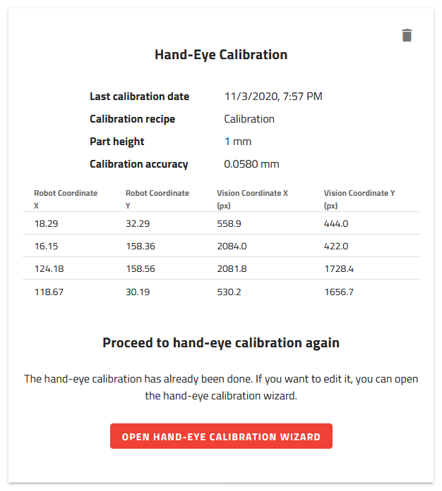
Fig. 167 Hand-eye calibration already performed
If the hand-eye calibration was already performed, some information regarding last hand-eye calibration is available:
Last calibration date
Calibration recipe
Part height
Calibration accuracy
Access hand-eye calibration wizard
Click on or to access the Hand-eye calibration wizard.
TCP Configuration
This section allows you to select a different end of line delimiter. This might be required depending on your robot and/or PLC.
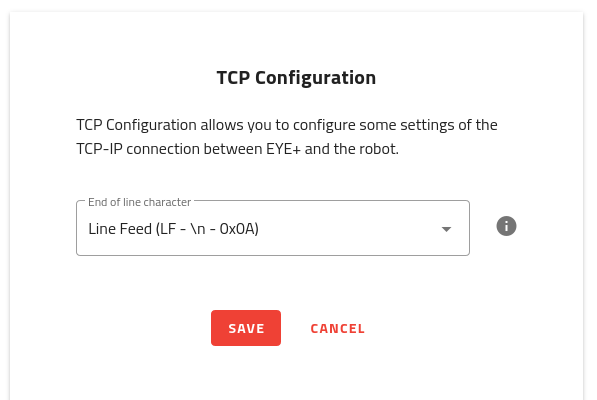
Three different options are available:
LF, end of line delimiter is the special character LF (i.e
\n, ASCII code0x0A)CR + LF end of line delimiter is the special character CR + LF (i.e
\r\n, ASCII codes0x0D 0x0A)CR end of line delimiter is the special character CR (i.e
\r, ASCII code0x0D)
The default end of line delimiter used by EYE+ Controller is LF.
Note
When changing this setting, any opened connection will be forcefully terminated.