Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Robot
Access the robot configuration through and Robot.
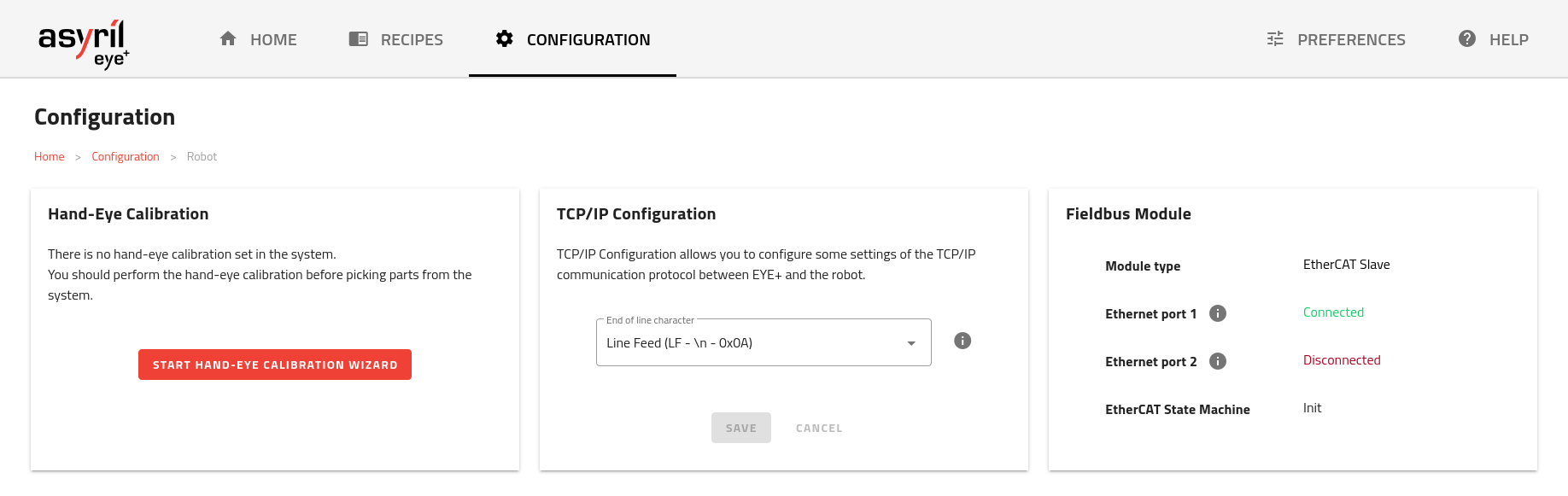
Fig. 165 Robot configuration interface
The robot configuration page consists of two sections:
Hand-eye calibration
The hand-eye calibration card informs you about the current state of the Hand-eye calibration wizard and allows you to open it.
Three variants of the interface are possible:
No hand-eye calibration performed (Fig. 166)
Fig. 166 No hand-eye calibration performed
Hand-eye calibration in progress (Fig. 167)
Fig. 167 Hand-eye calibration in progress
Hand-eye calibration already performed (Fig. 168)
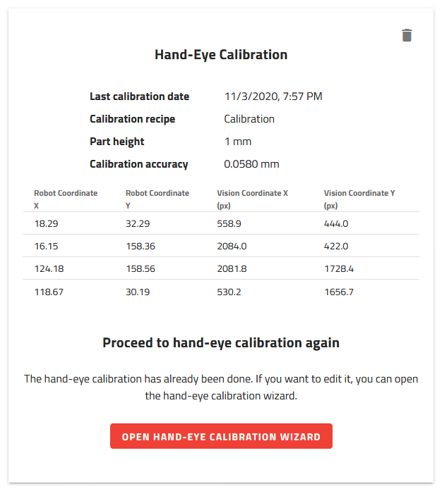
Fig. 168 Hand-eye calibration already performed
If the hand-eye calibration was already performed, some information regarding last hand-eye calibration is available:
Last calibration date
Calibration recipe
Part height
Calibration accuracy
Access hand-eye calibration wizard
Click on or to access the Hand-eye calibration wizard.
TCP Configuration
This section allows you to select a different end of line delimiter. This might be required depending on your robot and/or PLC.
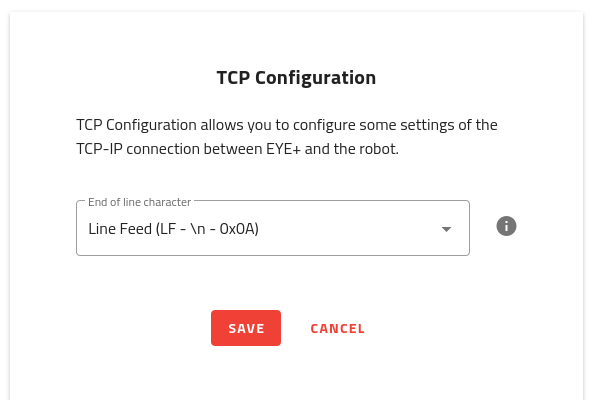
Three different options are available:
LF, end of line delimiter is the special character LF (i.e
\n, ASCII code0x0A)CR + LF end of line delimiter is the special character CR + LF (i.e
\r\n, ASCII codes0x0D 0x0A)CR end of line delimiter is the special character CR (i.e
\r, ASCII code0x0D)
The default end of line delimiter used by EYE+ Controller is LF.
Note
When changing this setting, any opened connection will be forcefully terminated.
Fieldbus Module
The Fieldbus Module card shows different information related to the optional Fieldbus Module.
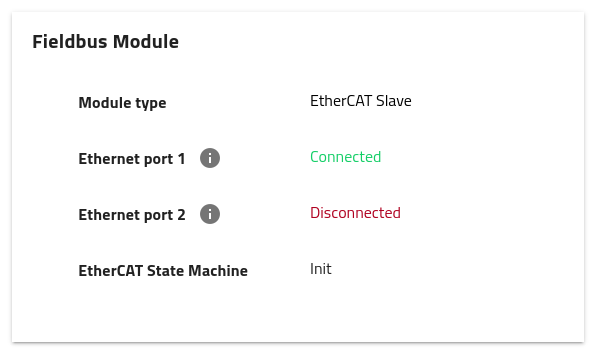
Module type, type of the module (i.e. the Fieldbus technology supported)
Ethernet port 1, Information related to the Ethernet port 1 (next to LEDs).
Ethernet port 2, Information related to the Ethernet port 2.
Other(s), various other information related to the specific Fieldbus Module installed.