警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .部品の種類を切り替える
最初のオプション
multi_part_quantity パラメータは EYE+ に特定の1個、または、複数の部品( a または b )を探すように指示するために使われます。これは、EYE+ が画像を取得する度に、画像上の特定の少なくとも <n> 個の部品を探すことを意味します。もしそれらの部品が見つからなければ、座標値は送信されず、 <n> 個の部品が見つかるまで振動して新しい画像を取得します。
このパラメータは、コマンド get_part および prepare_part の動作に影響を与えます。
次のシナリオでは、 a タイプの部品を取得し、次に b タイプの部品を取得する、というように、常に交互に部品を取得する方法を説明します。
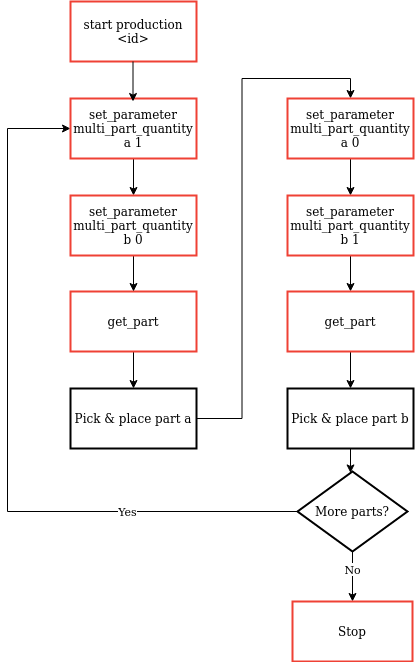
図 212 交互に部品のタイプを交替する自動運転のシナリオ
[set_parameter multi_part_quantity a 1]: パラメータ multi_part_quantity で
aを1に設定します。[set_parameter multi_part_quantity b 0]: パラメータ multi_part_quantity で
bを1に設定します。[get_part]: コマンド get_part を呼び出し、Asycubeを振動させて画像を取得するか、部品
a1個の座標値を直接送信します。aの1個以上の部品が見つけ、要求を満足するまでは、Asycubeの振動や画像解析は終了しません。 multi_part_quantity でbの個数が0に設定されているため、ここではb部品の座標は応答されません。[Pick & place part a]:
aタイプの部品をピックアンドプレースします。[set_parameter multi_part_quantity a 0]: パラメータ multi_part_quantity で
aを0に設定します。[set_parameter multi_part_quantity b 1]: パラメータ multi_part_quantity で
bを 1 に設定します。[get_part]: コマンド get_part を呼び出し、Asycubeを振動させて画像を取得するか、部品
bの座標値を1個、直接送信します。1個以上の部品bが見つかり、要求を満足するまでは、Asycubeの振動や画像解析は終了しません。 multi_part_quantity でaが0にセットされているため、aの座標は応答されません。[Pick & place part b]:
b部品をピックアンドプレースします。手順1からやり直します。EYE+ がコマンド stop production を受信するとサイクルが停止します。
2番めのオプション
次のシナリオは、厳密に言えば、上述の最初のオプションと同等ではありませんが、同様の結果を得るために使用することができます。部品 a と部品 b を交互に要求するのではなく、今回は a と b の両方を同時に要求します。ここで、システムが get_part が同じ応答の中で両方の部品を返すようにします。つまり、両方のタイプの少なくとも1個ずつのパーツが同時にピック可能でなければなりません。
これは、例えばロボットが2つのグリッパーを持っていて、操作を続けるためには a と b の両方をピックしなければならない場合に便利です。
a と b の両方が同時にピッキング可能であることを要求すると、フィードシーケンスの後に get_part を満たすことができる確率が下がり、サイクルタイムが長くなります。
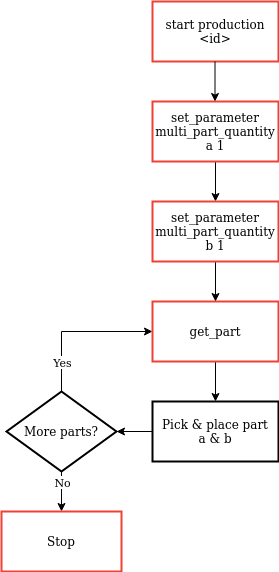
図 213 a と b の部品を常に1個ずつ取る自動運転のシナリオ
[set_parameter multi_part_quantity a 1]: パラメータ multi_part_quantity で
aを1に設定します。[set_parameter multi_part_quantity b 1]: パラメータ multi_part_quantity で
bを 1 に設定します。[get_part]: コマンド get_part を呼び出し、Asycubeを振動させて画像を取得するか、
aとbの1個ずつの部品の座標値を直接送信します。両方の部品が1個以上見つかり、要求を満足するまでは、Asycubeの振動や画像解析は終了しません。[Pick & place part a & b]:
aとbの部品をピックアンドプレースします。手順1からやり直します。EYE+ がコマンド stop production を受信するとサイクルが停止します。