警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .2.候補の検出
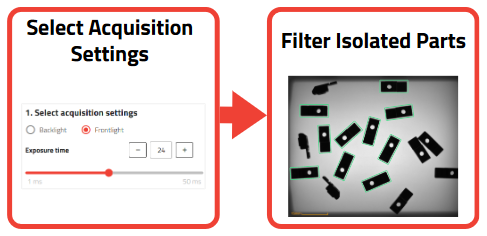
図 56 候補の検出の概要
候補の検出の目的は、部品の大きさを使って、候補(すなわち、ウィザードの次のステップで良い部品となる可能性のある「候補」)を検出することです。EYE+ 検出アルゴリズムは、画像の中で小さすぎたり大きすぎたりする要素をフィルタリングします。望ましくない部品の検出とは:
接触により1個と判定される複数個の部品
プラットフォームの破片
自動運転用のプレートの形状、または影を部品と検出する(例:溝のあるプレート)
ヒント
候補の検出の際には、その部品が現在向いている面のサイズが良い部品のサイズと異なる場合には、向きが良くない部品としてフィルタリングされてしまう可能性があり得ます。
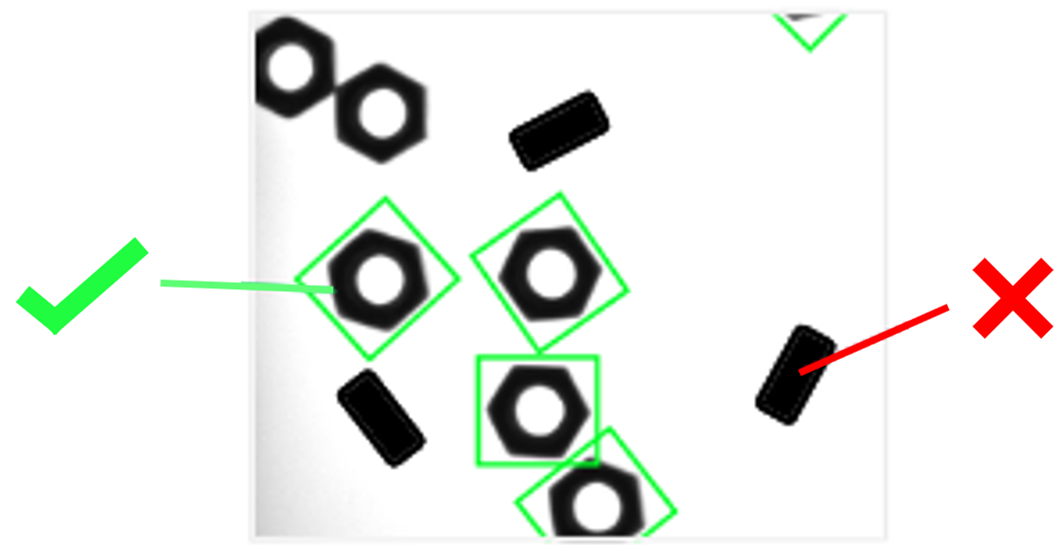
図 57 部品の向きの違いは、部品の大きさによってフィルタリングされます。この場合、良くない方向を向いた部品は面積が小さいため、フィルタリングされます。
このステップの最後では、他の部品から離れていて、緑の四角形(バウンディングボックスと呼ぶ)で囲まれた部品の数をできるだけ多くすると同時に、間違ったサイズで検出されている要素(ごみ、背景要素...)の数をできるだけ少なくする必要があります。