警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .3. 結果
図 132 評価の結果
ここでは、収集したすべての情報をもとに、前のステップで実行したすべての動作のサマリーを表示します。そして、自動運転のタイムラインをシミュレートするために、パラメータを調整する作業ができます。
注釈
1回目の画像取得と振動はこの計算に含まれていません。
統計データの動作
動作の統計データは、評価動作に基づくレシピの性能を反映したものです。
ヒント
これらの統計データは、レシピのボトルネックを特定するのにとても役立ちます。
ヒント
前のステップに戻ることで、評価動作をさらに追加することができます(以前のデータはすべて保持されます)。
合格品

図 133 統計データ動作 - 合格品の数
このグラフには、全部の評価動作で検出された合格品数の推移を表示します。
すべての評価動作によるこの指標の平均値が以下に表示され、最小値と最大値が表示されます(かっこ内)。
ヒント
合格品が見つからない場合、追加の振動シーケンスが必要になります。これはロボットの待ち時間に大きな影響を与えます。
最初の部品までの時間
図 134 統計動作 - 最初の部品までの時間
このグラフは、すべての評価動作の中でシステムが最初の良い部品を見つけるために要した時間の変化を示しています。
すべての評価動作によるこの指標の平均値が以下に表示され、最小値と最大値が表示されます(かっこ内)。
注釈
この指標は、あなたのビジョンレシピがどれだけ最適化されているかを直接反映しています。
ヒント
これを改善するためには、候補選択ステップまでに発生する不合格品数を減らしたり、ピックポイントやピックアングルの学習ステップで不要な特徴をすべてマスクすることの検討が必要です。
充填率
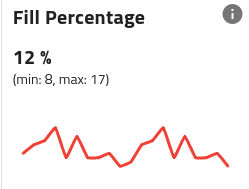
図 135 統計動作 - 充填率
このグラフは、全ての評価動作の中で、画像解析によって測定された充填率の変化を表示したものです。
すべての評価動作によるこの指標の平均値が以下に表示され、最小値と最大値が表示されます(かっこ内)。
部品の分布
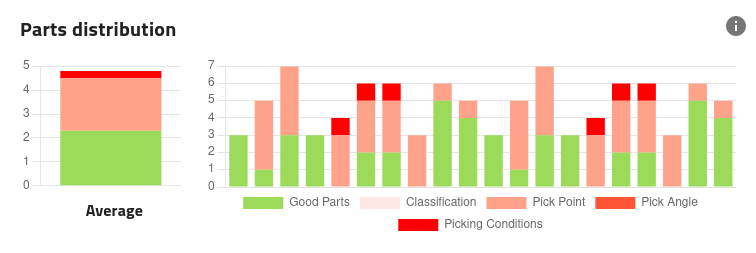
図 136 統計動作 - 部品の配布
右側のグラフには、各評価動作での受け付け部品と拒否の部品の個数の分布を表示します。
左側のグラフには、全ての評価動作の平均分布を示しています。
ヒント
このチャートを使って、レシピのどのステップを改善すればよいかを確認します。
良い部品の分布
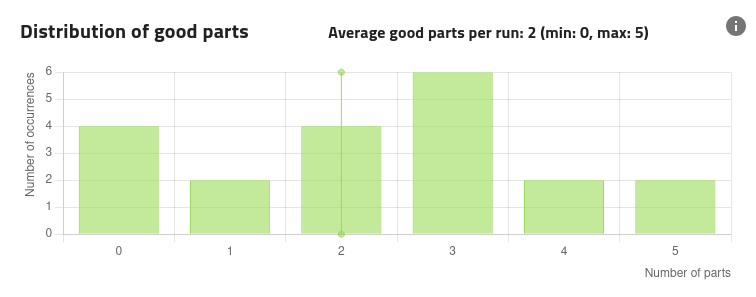
図 137 統計動作 - 良い部品の分布。
このグラフには、評価動作中に測定された合格品数の分布を表示します。
注釈
振動シーケンスがロボットのサイクルタイムよりも長い場合、ロボットは各振動シーケンスの間に待機することになります。1回の動作での合格品数の平均値は、この待ち時間がどのくらいの頻度で発生するかを示しています。
ヒント
合格品が見つからない場合、追加の振動シーケンスが必要になります。これはロボットの待ち時間に大きな影響を与えます。
サイクルタイムシミュレーション
ここでは、評価動作と、理論上のロボットのサイクルタイムと先読み率を組み合わせて、自動運転のタイムラインをシミュレーションします。
振動シーケンスや画像解析が自動運転のタイミングにどのような影響を与えるかを評価するために使用します。
ロボットのサイクルタイム
シミュレーションを計算するためには、ロボットのサイクルタイムを入力する必要があります。この値を変更することで、ピックレートとロボットの待ち時間への影響を見るできます。
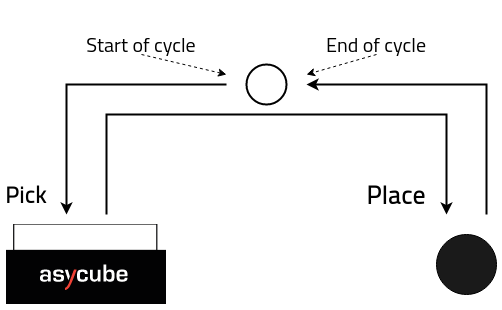
図 138 ロボットのピックアンドプレースサイクルの画像表示
先読み率
同じく、ロボットと連動しているのが先読み率です。これは、パフォーマンスを向上させるために、ロボットがまだ動いている間に EYE+ が動作して、振動したり、写真を撮ったりすることができるサイクルタイムの中の割合を%で表しています。この名の通り、このパーセンテージはサイクルタイムの最後のXパーセンテージを参照しており、Xは先読み率となります。例えば、サイクルタイムが1000msでこの値を20% に設定した場合、 EYE+ は800ms後(最後の20%)に振動/撮影が可能になります。
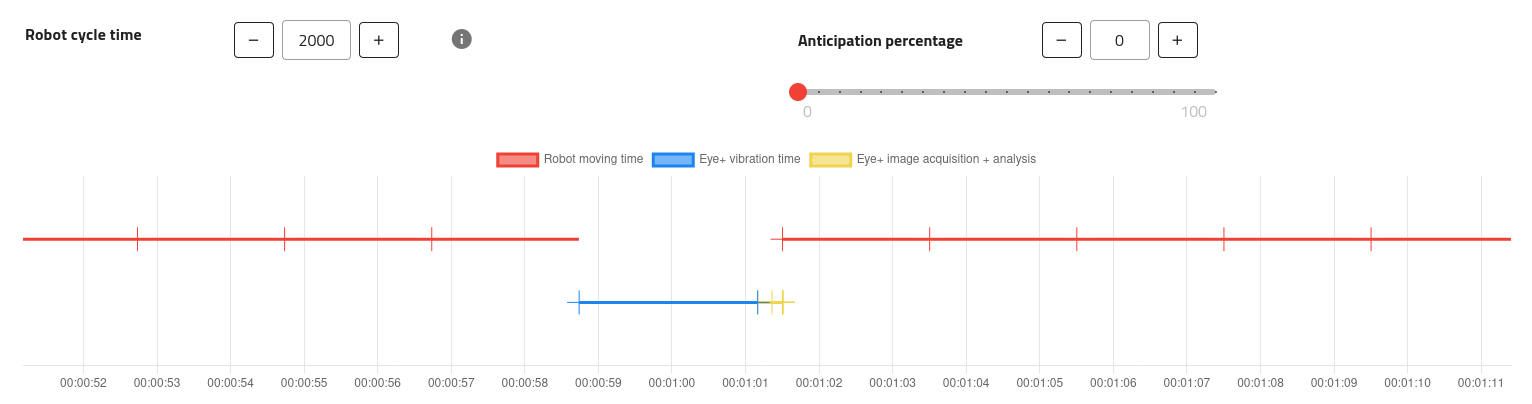
図 139 先読み率が0%のタイムライン
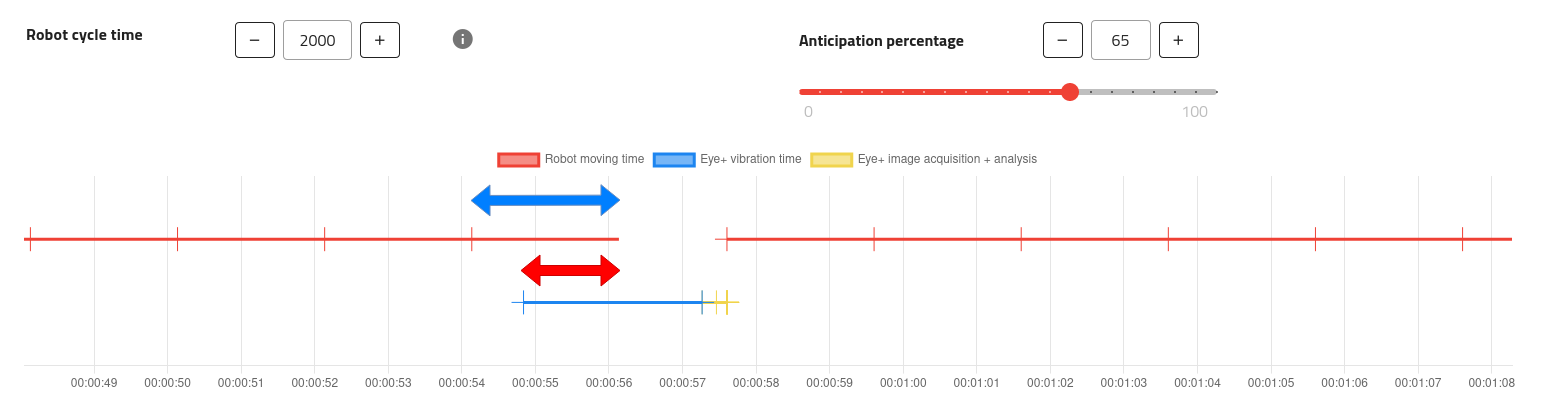
図 140 先読み率が65%のタイムライン
上の図では 65%の先読み率を選択したことにより、赤の矢印が青の矢印のちょうど 65%になっています(1300ms対2000ms)。
注釈
一度実行した後にこの割合を変更しても、次には先読みすべき振動がないため、データには何の変化もありません。
ピック率
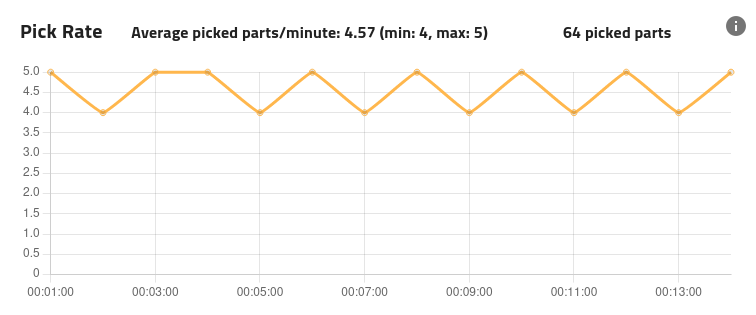
図 141 サイクルタイムシミュレーション - ピックレート
ピッキング率は評価動作のデータを使って計算され、ロボットのサイクルタイムや先読み率を変更すると変動します。
平均値、最小値、最大値がグラフの上に表示されます。
タイムライン
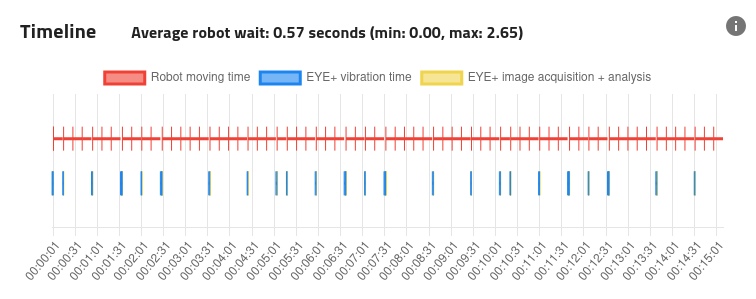
図 142 サイクルタイムシミュレーション - タイムライン
タイムラインには2つの異なるトラックが含まれており、上のトラックはロボットに関連し、下のトラックは EYE+ に関連するものです。ロボットトラックは、ロボットが get_part コマンドに対するレスポンスを取得した時に、縦のバーで表示されます。連続したライン上の各々のバーは、専用フィールドを使って設定できるロボットのサイクルタイムの値の間隔で表示されます。
EYE+ トラックは、通信で接続されているAsycubeが振動シーケンスを実行した時、その持続時間が経過した時、画像がキャプチャされた時、良い部品の座標を get_part コマンドを使用するロボットに対して送信する準備ができた時など、ビジョンの全てのイベントを示します。
ヒント
タイムライン上でマウスを使ってズーム/パンし、特定のポイントに焦点を当てることができます。