警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .1つ目の部品をピック
システムの「取り付け」、「校正」、そして「設定」が完了しました。ここでは、システムのテストに使用するTCPターミナルと、標準自動運転のフローを紹介します。
TCPターミナル
から をクリックします。次の画面( 図 11)が表示されます。
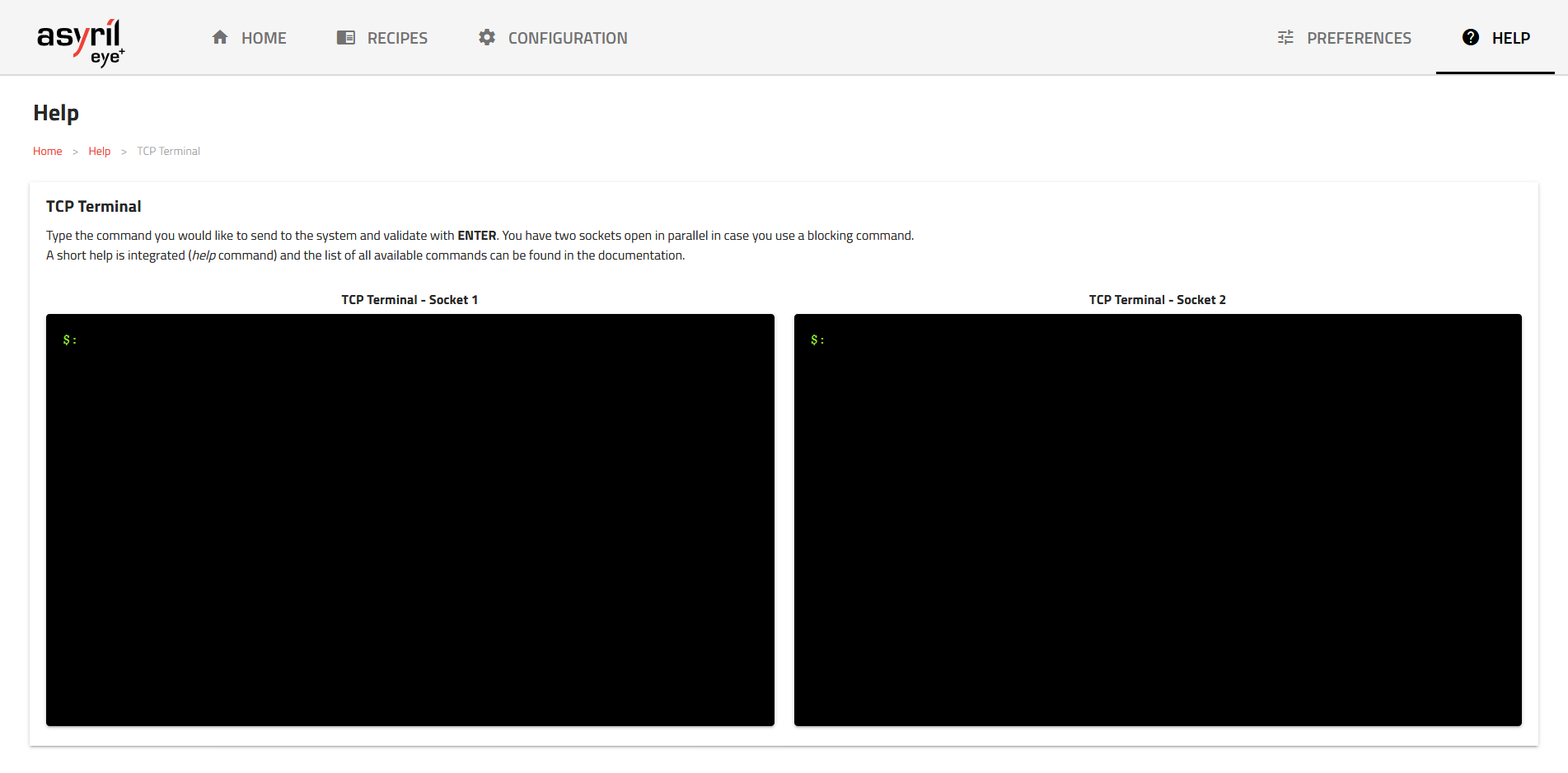
図 11 TCPターミナル
2つのターミナルは、TCP/IPソケットメッセージング(1つのターミナルにつき1つのソケット)を介して EYE+ Controller と通信します。
EYE+ Controller の状態が
準備完了の状態であることを確認してください。 get_parameter`コマンド(ここで、 ``<パラメータ>` は状態)を送信して、現在の状態を確認してください。この時の応答は、``200 ready``でなければなりません。
注釈
もし レシピの作成、カメラの設定、ハンドアイキャリブレーション、 あるいはすでに``自動運転`` の状態である場合は、 EYE+ Studio 上で他のページが開いていないかを確認してください。もし開いている場合は、すべて保存して閉じてください。
標準自動運転のフロー
図 12 は、標準自動運転のフロー図です。
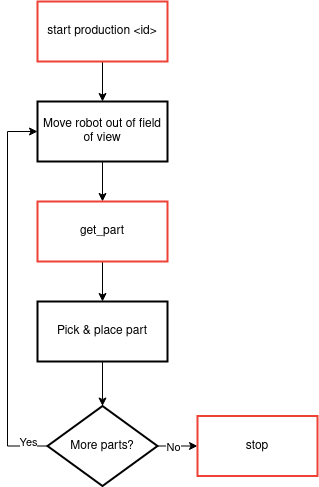
図 12 標準自動運転のフロー
:ref:`get_recipe_list`コマンドを送信します。EYE+ Controller に保存されている既存のレシピのリストが表示されます。初めてのレシピの名前とIDが表示されます。
start production <id> (ここで
<recipe_id>はレシピのIDです)を送信して自動運転を開始します。これにより、EYE+ が自動運転状態に切り替わります。ロボットがカメラの視野に入っていないことを確認してください。
少なくとも1個の部品がAsycube上にある状態で、 get_part を送信します。次のようなメッセージが送られてきます。
200 x=0.12345 y=6.78910 rz=11.12で、ここで200とは、うまく行ったことを示す応答であり、x、y、rzは検出されたロボット座標系の部品の座標です。ロボットは受信した座標値まで動き、部品をピックします。
一度ロボットが部品をピックした後で、次の部品をピックしたい場合は、単に get_part をもう一度送信します。
注釈
stop <state> (ここでは <状態> は``自動運転``)を送ることで、システムを 準備完了 状態に戻すことができます。
初めてのピックアンドプレース
これで、初めて EYE+ と通信するロボット/PLCプログラムを実行する準備が完了しました。