警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .初めてのスタートアップ
ここでは、製品の開梱から EYE+ Studio への初期接続までのステップを説明します。
EYE+ Controller の実装
EYE+ Controller を開梱します。
M4を4本を使用して、操作盤に EYE+ Controller を固定してください。EYE+ Controller を垂直に固定し、盤内の換気を行うことを推奨します。詳しくは EYE+ Controller 標準仕様 を参照してください。
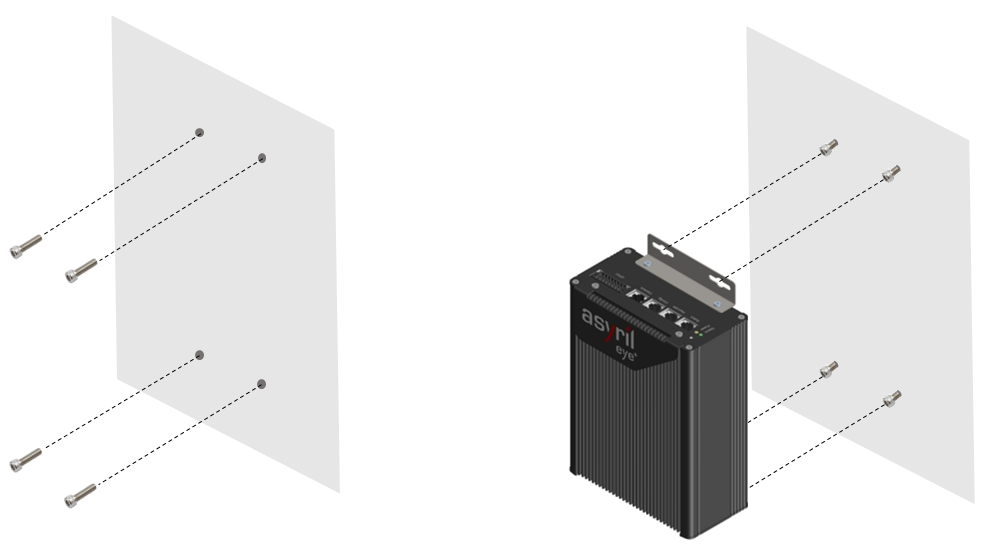
図 4 EYE+ Controller 実装ステップ 1と2
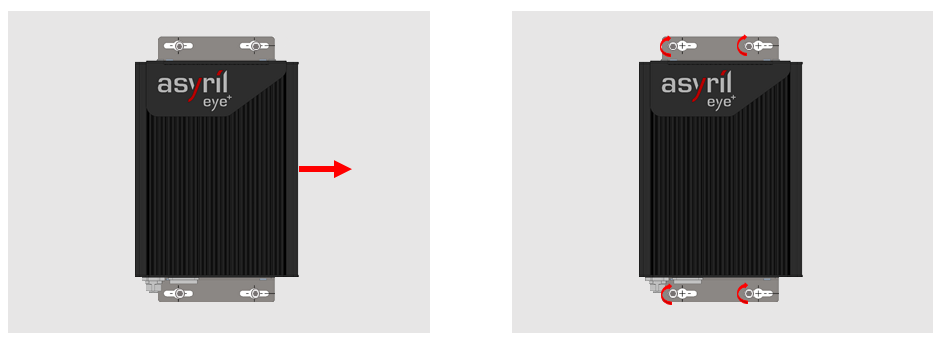
図 5 EYE+ Controller 実装ステップ 3と4
ヒント
EYE+ Controller のサイズは EYE+ Controller に記載しています。
カメラの取り付け
カメラとレンズを開梱します。レンズは既にカメラに取り付けられています。
M3の4つの取り付け穴( 図 17 でMと表示)を使ってカメラを固定します。
カメラの取り付け位置は、次の通りです。
カメラはAsycubeに直交し、その中心の真上に配置してください。
重要
部品を正確に検出するためには、カメラは必ずAsycubeと直交させてください。つまり、カメラがAsycubeに対して傾いていないようにしてください。そのためには、カメラをAsycubeの面と平行に取り付けてください。この段階では、この点が最重要注意事項です。
レンズの前面とAsycubeプレートの間の距離は、動作距離相当の長さ(動作距離は近距離)としてください ( 表 3 を参照)。
カメラの視野は、Asycubeプレートの内側の端に合うように設定してください。カメラの EYE+ のロゴが、Asycubeコネクタ(図 6)と反対側に来るように取り付けてください。
重要
カメラの位置がZ方向では-10mm/+30mm、XとY方向では-10mm/10mmの範囲で機械的に調整できるように、カメラの取付け関連のサイズを設計するよう推奨致します。
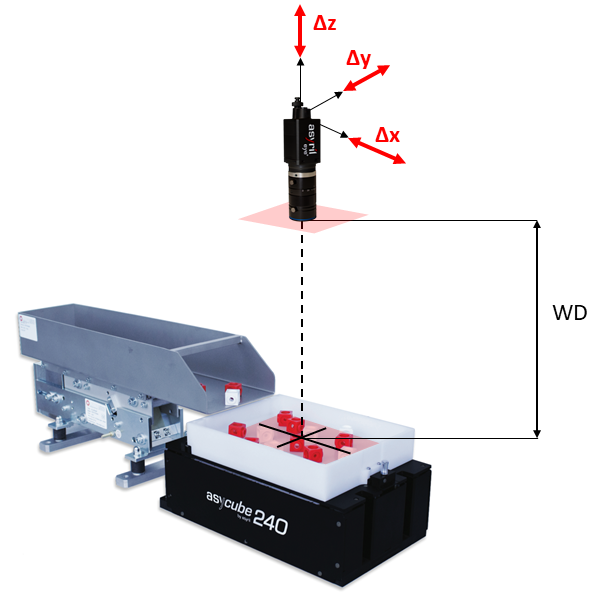
図 6 カメラの設定位置
ヒント
カメラとレンズのサイズは カメラとレンズ に記載しています。
ケーブルの接続
イーサーネットケーブル(少なくともCat5e SF/UTP以上のスペック)を使って、Asycube イーサーネット通信 コネクタと EYE+ Controller Asycubeポート を接続します。
イーサネットケーブル(PoE Cat6 S/FTP)を使って、カメラの M12イーサネットコネクタ と EYE+ Controller の カメラポート を接続します。
イーサネットケーブル(少なくともCat5e SF/UTP)を使って、コンピュータ(PC)の RJ45ポート と EYE+ Controller の CONFIGポート を接続します。
付属の電源ケーブルを使って、DC24V (12.5A) 電源に EYE+ Controller を接続します (配線については 表 12 を参照)。
【オプション】イーサネットケーブル(少なくともCat5e SF/UTP)を使って、ロボットまたはPLCを EYE+ Controller の Robot ポート に接続します。クイックスタートを実行するだけの場合は、PLCやロボットに接続する必要はありません。あとで接続することができます。
【オプション】付属のケーブルを使って、フロントライトを EYE+ Controller の Frontlight 入力 に接続してください。
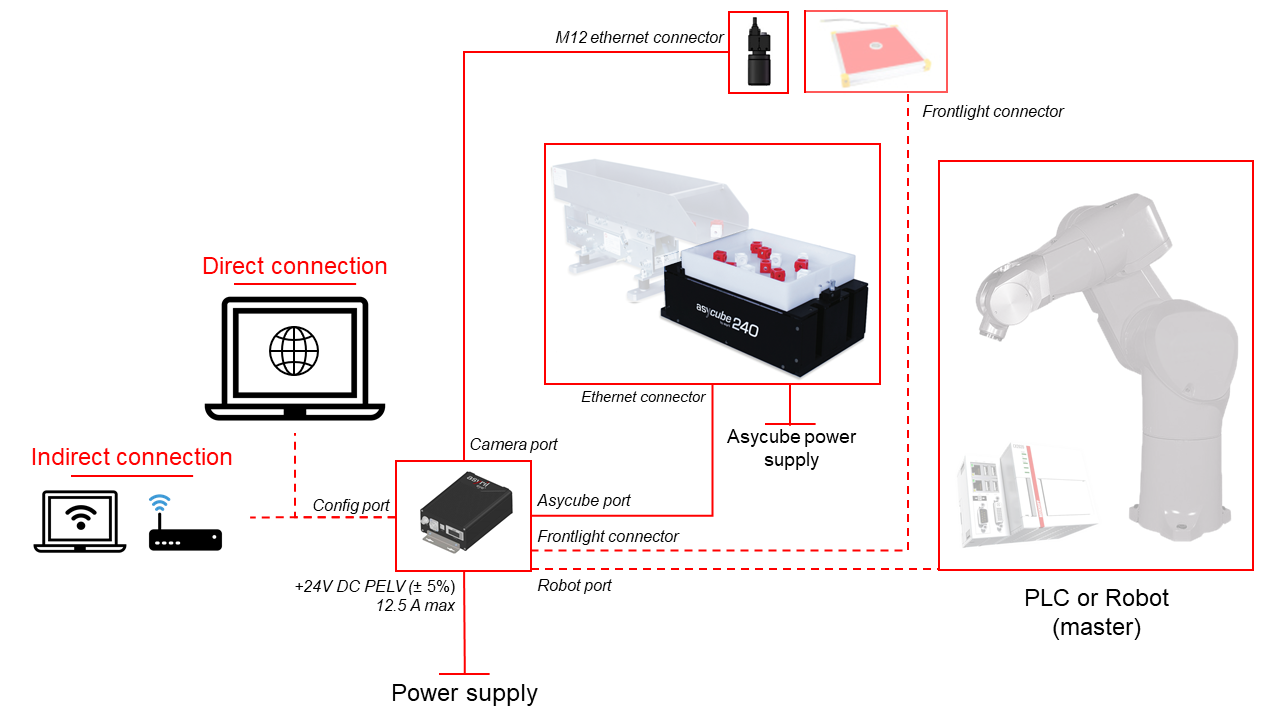
図 7 EYE+ 配線図
ヒント
EYE+ 配線について、詳細は 電気的インターフェイス を参照してください。
初めての接続
上のステップを完了すると、パソコンから EYE+ Studio にアクセスできるようになります。
コンピュータのIPアドレスを、EYE+ Controller と同じネットワーク( 表 4)になるように変更します。
イーサネットポート |
IPアドレスの初期設定 |
サブネットマスクの初期設定 |
|---|---|---|
構成 |
192.168.1.50 |
255.255.255.0 |
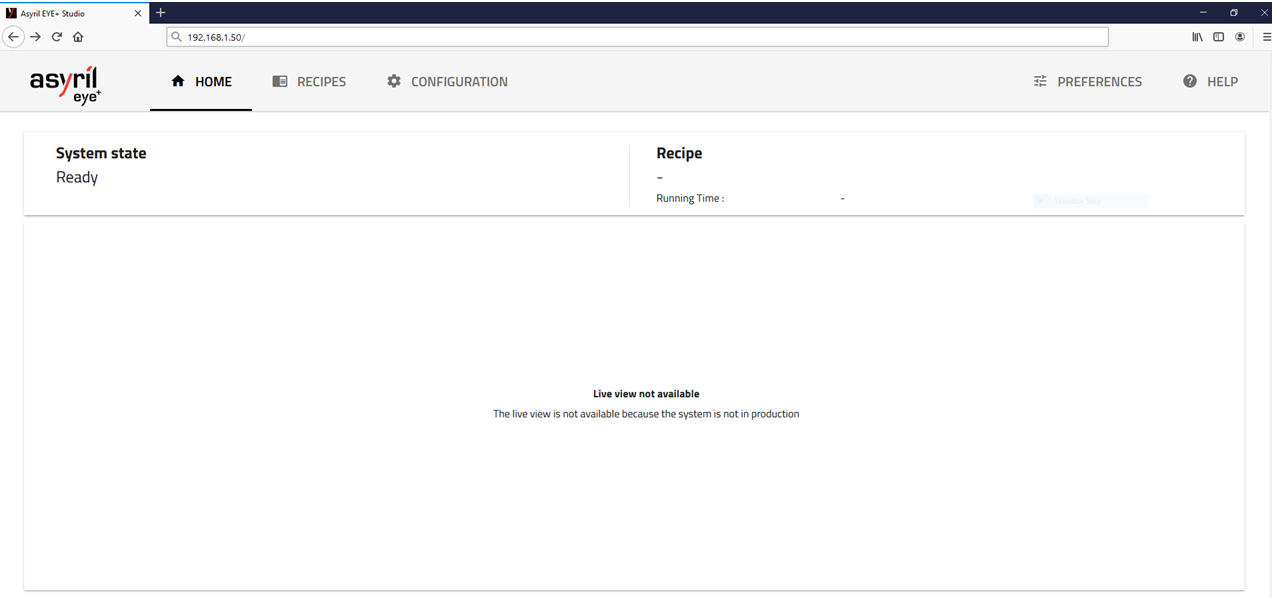
図 8 ダッシュボード
これで EYE+ Studio に接続されました。
ヒント
このインターフェース画面が表示されない場合は、ケーブルの接続を確認し、PCのIPアドレスが EYE+ Controller と同じネットワークとなっているかを確認してください。例えば、192.168.168.1.55などです。