警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .カメラとレンズ
サイズ
カメラを4つのM3取り付け穴( 図 17 のMの表示)で固定します。
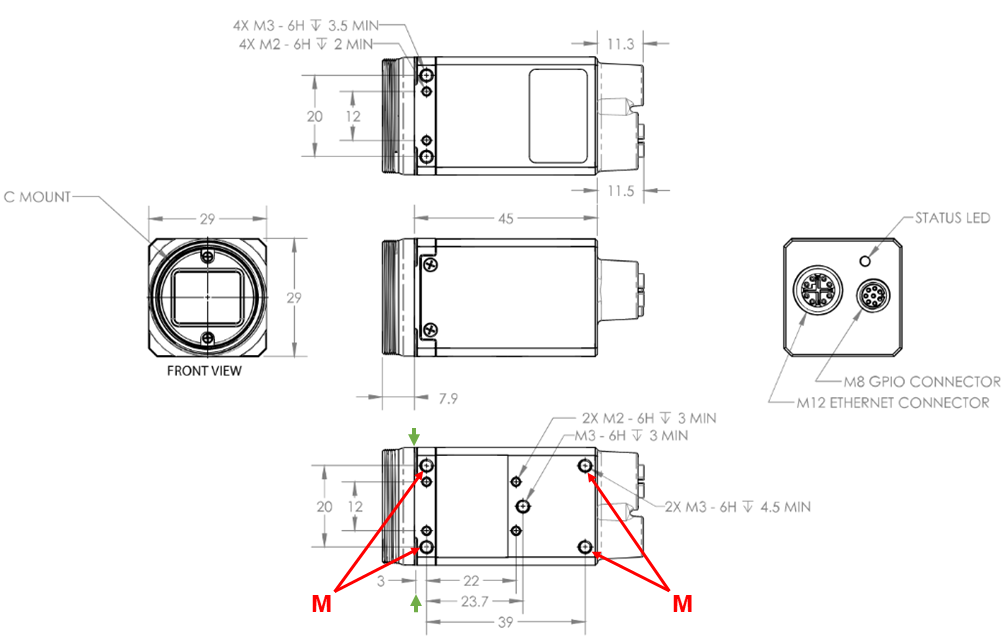
図 17 カメラサイズ、M=取付穴
Asycube のサイズや動作距離に応じて、異なるレンズを使用します。異なるビジョンキット( 図 18 を参照)の主要サイズに関しては、 表 6 、または、 表 7 をご覧ください。
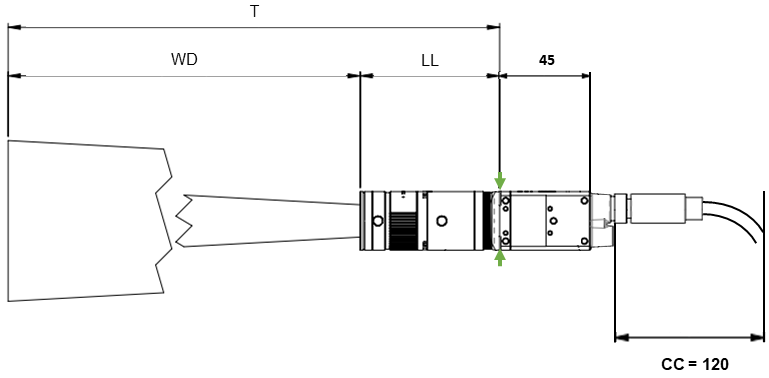
図 18 ケーブルを接続した状態のカメラのサイズ [mm];T=全長、WD=動作距離、LL=レンズ長さ、CC=ケーブルコネクター + ケーブル曲げ長さ
特徴 |
値 |
|---|---|
重量 |
67g |
サイズ |
29 x 29 x 64.4 mm |
保存温度 |
-30~60°C |
動作温度 |
周囲温度 -20~55°C |
湿度 |
動作条件:20% ~ 80% 相対湿度 |
衝撃と振動 |
DIN EN 60068-2-27、DIN EN 60068-2-64、DIN EN 60068-2-6 |
保護等級(IP) |
IP67 |
Asycube |
WD: 動作距離 [1] |
LL: 最大レンズ長さ [2] |
TL: 全長 |
レンズ重量 |
|---|---|---|---|---|
Asycube 50 |
短:390mm |
50 mm |
440 mm |
0.08kg |
長:560mm |
95 mm |
655 mm |
0.22 kg |
|
Asycube 80 |
短:580mm |
50 mm |
630 mm |
0.08kg |
長:850mm |
95 mm |
945 mm |
0.22 kg |
|
Asycube 240 |
短:790mm |
60 mm |
850 mm |
0.06 kg |
長:1070mm |
60 mm |
1130 mm |
0.07 kg |
|
Asycube 380 |
短:810mm |
45 mm |
855 mm |
0.08kg |
長:1260mm |
60 mm |
1320 mm |
0.06 kg |
|
Asycube 530 |
短:900mm |
65 mm |
965 mm |
0.09kg |
長:1260mm |
45 mm |
1305 mm |
0.08kg |
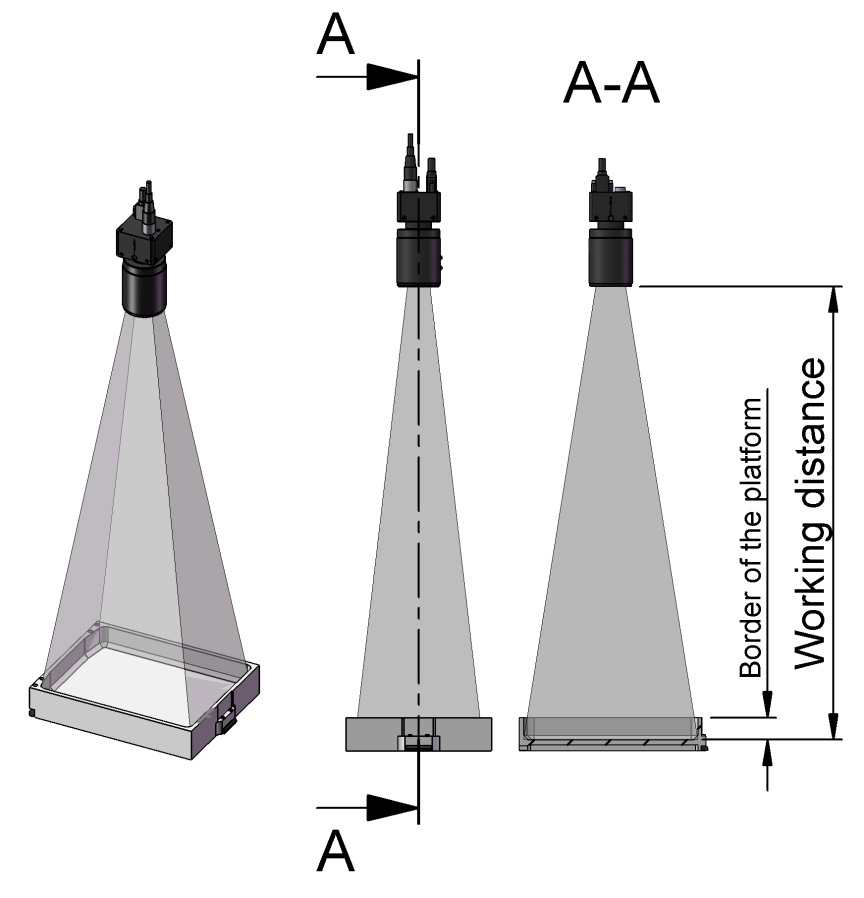
図 19 動作距離
カメラとレンズの取り付け
カメラとレンズを開梱します。レンズは既にカメラに取り付けられています。
M3の4つの取り付け穴( 図 17 でMと表示)を使ってカメラを固定します。
カメラ位置
カメラはAsycubeに直交し、その中心の真上に配置してください。
重要
正確な部品検出には、カメラとAsycube の直交性が重要です。取り付けのこの段階では特に注意が必要です。
レンズ表面とAsycube の振動プレートの間の距離は、動作距離の長さに合わせてください( 表 7 を参照)。
視野を振動プレート枠の内側に合わせてください。 EYE+ のロゴが、Asycube のケーブルコネクタ( 図 20 )の反対側になるように取り付けてください。
重要
カメラの位置がZ方向では-10mm/+30mm、XとY方向では-10mm/10mmの範囲で機械的に調整できるように、カメラの取付け関連のサイズを設計するよう推奨致します。
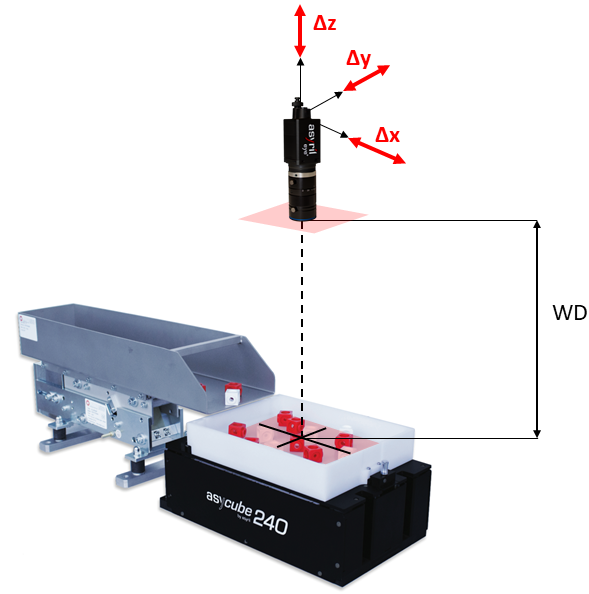
図 20 カメラの位置; WD = 動作距離