警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .初期設定のシナリオ
このシナリオでは、ロボットはどのモデルからもパーツを選ぶことができ、その順番は決まっていません。そのため モデル数(model_quantity) パラメーターは必要ありません。 get_part コマンドは、単に最初に見つかったパーツを返します。
get_part コマンドからの戻り値には、関連付けられたモデルが含まれています。戻り値を解析してモデル番号を抽出する方法の詳細については、コマンドのドキュメントを参照してください。
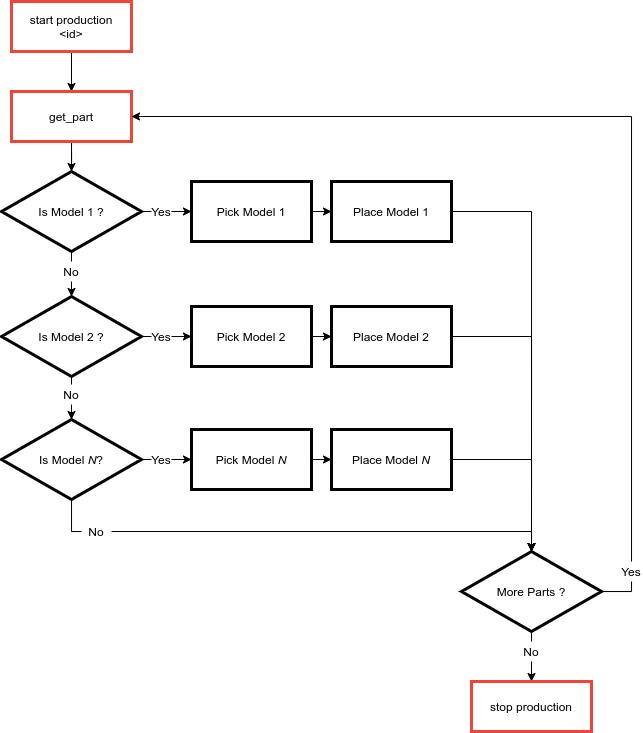
図 267 マルチモデルのための自動運転のシナリオ