警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .モジュールの概要
EtherCAT モジュールは、回路的には次のようになります。
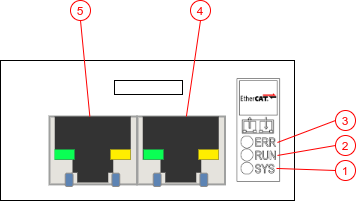
図 218 EtherCAT モジュール
システム LED(SYS)
ラン LED(RUN)
エラー LED(ERR)
インターフェース X1(EtherCAT IN)標準RJ45
インターフェース X2(EtherCAT OUT)標準RJ45
LED 動作
次の表は、本機に搭載されている各種 LED を紹介しています。
LED |
色 |
状態 |
説明 |
|---|---|---|---|
RUN |
オフ |
オフ |
INIT 状態のモジュール |
緑色 |
点滅 |
安全運転状態のモジュール |
|
緑色 |
シングルフラッシュ |
安全運転状態のモジュール |
|
緑色 |
ソリッド |
運転状態のモジュール |
|
エラー |
オフ |
オフ |
エラーなし |
赤色 |
点滅 |
内部エラー |
|
赤色 |
シングル |
内部エラー |
|
赤色 |
ソリッド |
内部エラー |
|
イーサネット LED |
オフ |
オフ |
リンクを確立していません |
緑色 |
点滅 |
モジュール送信中 |
|
緑色 |
ソリッド |
リンクを確立しました |
ネットワークトポロジー
複数の EtherCAT デバイスを接続する場合、2つのトポロジーを実現できます。
- デイジーチェーン型やスター型トポロジー。
モジュールはデイジーチェーンのように接続され、モジュール1 の EtherCAT 出力がモジュール2 の EtherCAT 入力に接続され、以下同様に接続されます。最後のモジュールはマスターに接続する必要はありません。
- リングトポロジー
モジュール1の EtherCAT 出力がモジュール2の EtherCAT 入力に接続して、最後のモジュールを EtherCAT マスターに接続します。そうすることにより、モジュールはリング状に接続されます。
お客様のニーズに合ったトポロジーを選択するために、お客様の条件を確認してください。
プロセスデータオブジェクト
EtherCAT は、プロセスデータオブジェクト(PDOs)を使って、周期的なリアルタイムデータを交換することができます。PDO は、2つの方向に対応する2種類があります。RxPDOs とTxPDOs です。
PDO には、必要なコマンド、パラメータ、出力データがすべて実装されているので、 EYE+ をアプリケーションに簡単かつ完全に統合することができます。PDO は、TCP プロトコルのインターフェースを反映し、特定で便利なインターフェースを提供しています。EtherCAT モジュールを使用して EYE+ を統合する前に、 TCP プログラミングガイド を是非ご一読ください。
ESI ファイルは、 EtherCAT ダウンロード から直接ダウンロードできます。
RxPDO
名称 |
データタイプ |
|---|---|
符号なし整数(UDINT) |
|
ブーリアン型 |
|
ブーリアン型 |
|
レシピ ID |
符号なし整数(UDINT) |
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
符号なし整数(UDINT) |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
USINT |
|
REAL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
TxPDO
名称 |
データタイプ |
|---|---|
符号なし整数(UDINT) |
|
ブーリアン型 |
|
ブーリアン型 |
|
符号なし整数(UDINT) |
|
ブーリアン型 |
|
ブーリアン型 |
|
符号なし整数(UDINT) |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
10 ポーズの繰り返し(N = 1 〜 10) |
|
REAL |
|
REAL |
|
REAL |
|
USINT |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
ブーリアン型 |
|
REAL |
|
6 モデル準備の繰り返し(N = 1 〜 6) |
|
USINT |
|
6 モデル数量のリードバックを繰り返す(N = 1 〜 6) |
|
USINT |
|
10 ポーズモデル(N = 1 〜 10) |
|
USINT |
|