警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .部品を準備(Prepare part)
基本シナリオ( get_part)自動運転サイクルタイムを短縮するために、 prepare_part を含むシナリオを利用します。
部品がピックされ、ロボットがカメラの視野から離れるとすぐに、 prepare_part コマンド で( 図 247 )を送信できます。これにより、システムは新たに部品を探し始め、その座標値をメモリに保存します。
ヒント
prepare_part コマンドを実行している間は、例えば、最後にピックした部品をプレースしたり、またはカメラの視界を妨げない限り、ロボットは必要なことを何でも行うことができます。
そのため、 get_part コマンドが送られる時には、prepare_part により既に部品が準備されている可能性が高いと考えられます。既に部品が準備されている場合、 get_part コマンドにより、アジキューブを振動させたり画像を取得することなく、部品の座標値を直接取得することができます。
また、 部品数(part_quantity) パラメータを変更することで、複数の部品を用意して一度に取得することが可能です。初期設定では、このパラメータは1に設定されています。詳しくはシナリオ 部品数(Part quantity = <n>) を参照してください。
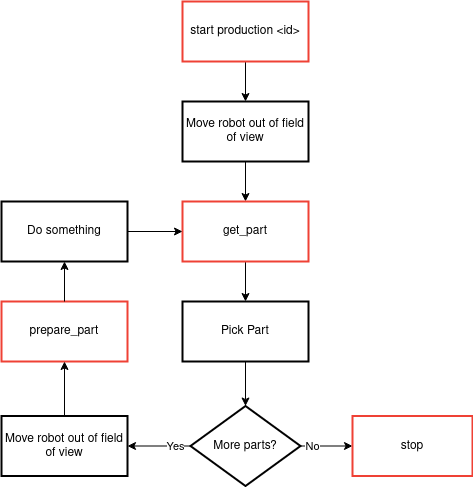
図 247 prepare_part と get_part を使う自動運転のシナリオ
[Move robot out of field of view] get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
[get_part] get_part コマンドを呼び出すと、アジキューブを振動させて画像を取得するか、部品の座標値を直接送信します。このシナリオでは、最後に実行した get_part コマンドで既に部品が見つかっている可能性が高いと考えられます。
[Pick part] 部品(ワーク)をピックします。
[Move robot out of field of view] prepare_part コマンドを呼ぶ前に、カメラの視界を遮るものがないことを確認する必要があります。
[prepare_part] prepare_part コマンドは、アジキューブを振動させて画像を取得します。または、既に部品が見つかっていてメモリに保存されている場合は何もしません。
[Do something] 部品をプレースしたり、ロボットできることをしてください。このロボット動作は、ステップ5と並行して動作します。そのため、ロボットがカメラの視野に入らないように注意してください。
手順1からやり直します。 EYE+ が 自動運転を停止する コマンドを受信するとサイクルが停止します。