警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .ハンドアイキャリブレーション
ハンドアイキャリブレーションについて
ハンドアイキャリブレーションの目的は、検出された部品の X とY 座標をビジョンフレームからロボットフレームに変換することです。これにより、ロボットがピックする部品の座標を要求した時に、その座標がそのまま直接フレーム内にあります。ハンドアイキャリブレーションは、ビジョンで検出される4つのポイントと、それに対応する4つのロボット座標を組み合わせることで実現します。
ヒント
ロボット座標系は、アジキューブのプレートの面の表面の高さと合わせる必要があります。
ハンドアイキャリブレーションウィザードにアクセスする
ハンドアイキャリブレーションは、オンボーディングツールの3番目のステップです( 図 12 )。 ページから をクリックしてウィザードを開きます。
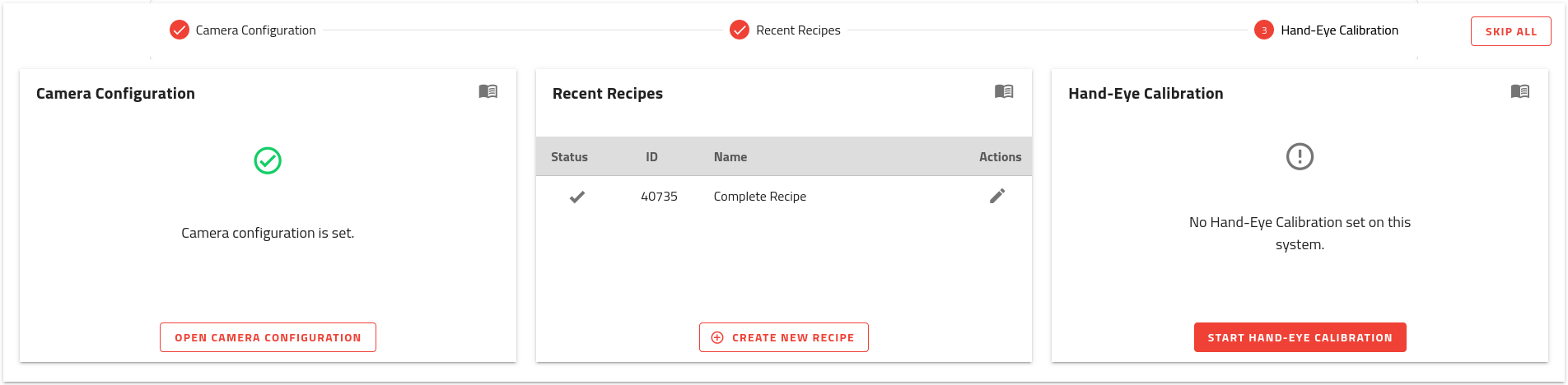
図 16 「ホーム」ページ オンボーディング - ステップ 3 - ハンドアイキャリブレーション
からアクセスすることも可能です。まず、 をクリックし、 ロボット に移動し、最後に をクリックします。
ハンドアイキャリブレーションを実行
ウィザードのステップに従ってハンドアイキャリブレーションを実行してください。
注釈
ハンドアイキャリブレーションに関する詳細は、 ハンドアイキャリブレーションウィザード を参照してください。
ページに戻ると、最後のステップも完了し( 図 17 )、オンボーディングステップが消えていることに気づきます。
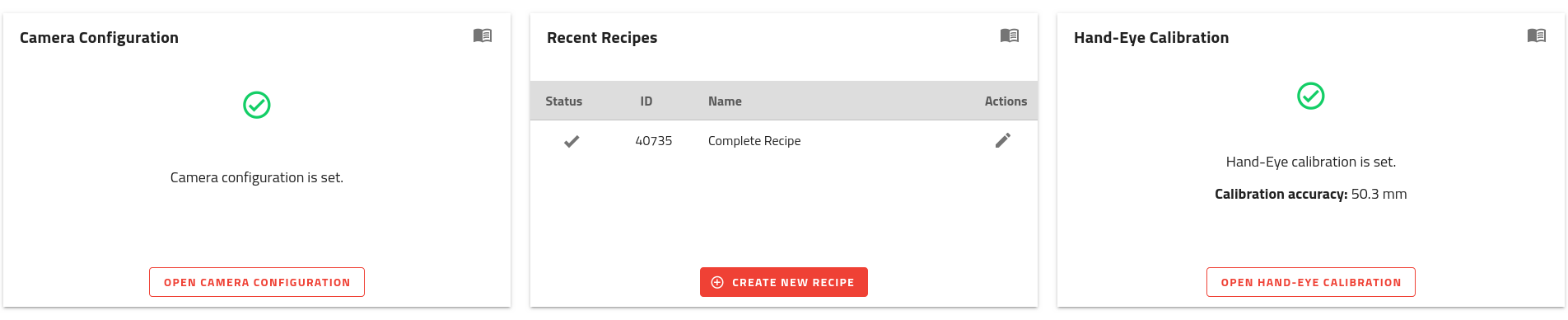
図 17 「ホーム」ページ - オンボーディングを完了
最初のパーツの位置を得る準備ができました!次のステップに進んでください。