警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .1.1 部品を広げる
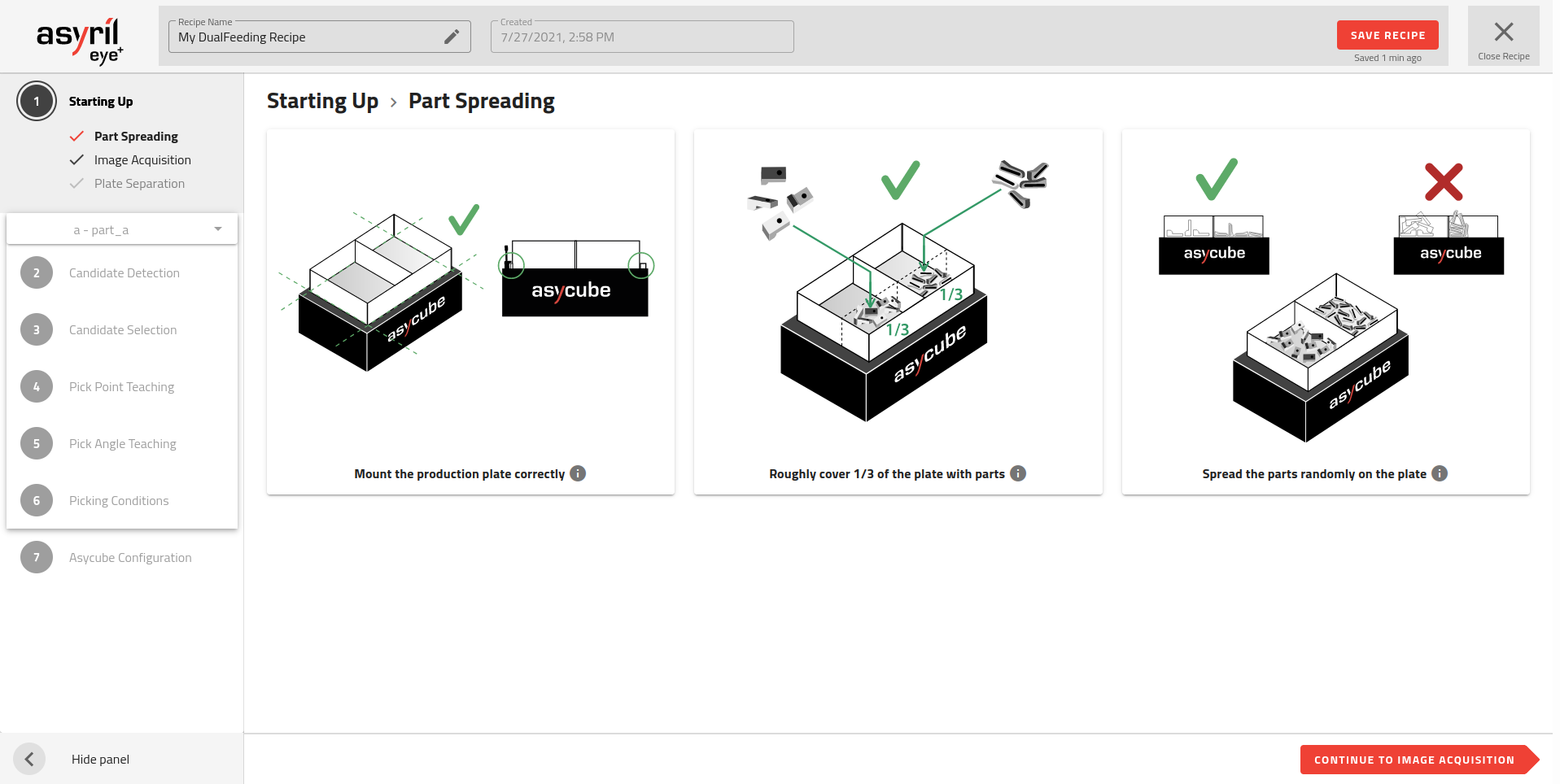
図 211 運転開始から部品を広げるまで
運転を開始する前に、Asycubeのデュアルフィーディング用の振動プレートが正しく取り付けられていることを確認してください。
次に、振動プレート上の該当する側に適度な数の部品を均等に配置します。適切な部品数を見つけるための一般的な目安として、各プレートの3分の1のエリアに部品をバラ積みします。
部品をランダムに広げ、部品が色々な向きを向くようにしてください。
良い向き とは、ロボットのピックサイドに適した向きのことです。
悪い向き とは、ロボットのピックサイドに適していない向きのことです。
ヒント
部品同士が接触したままになっている場合(2個の部品が1つのグループの山を作る状態)、この部品のグループが、候補の検出の段階で不合格となるように設定します。
1.2 画像取得
このステップは、1個の部品用のレシピと全く同じです。詳しくは、 1.2 画像取得 をご覧ください。