警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .ハンドアイキャリブレーションウィザード
ハンドアイキャリブレーションウィザードはハンドアイキャリブレーションの操作方法をガイドします。
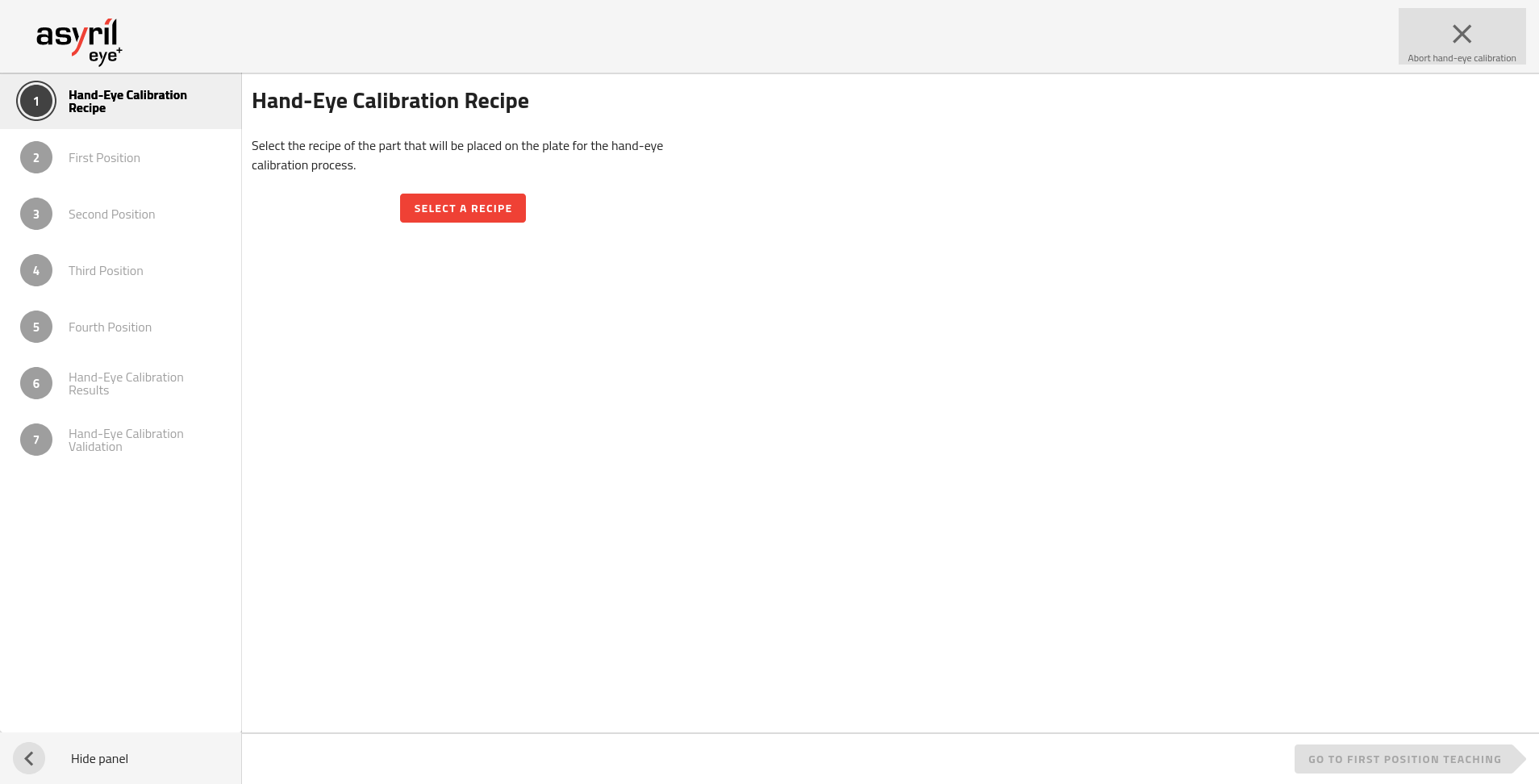
図 168 ハンドアイキャリブレーションウィザード
7つのステップになります。
注釈
ロボット座標系の設置方法や、ハンドアイキャリブレーションの精度を上げる方法については、 ハンドアイキャリブレーション のグッドプラクティス を参照してください。
1.ハンドアイキャリブレーションのレシピ
ハンドアイキャリブレーションに使用するレシピを選択する必要があります。必要なレシピパラメータが、ハンドアイキャリブレーションレシピにコピーされます。選択されたレシピとハンドアイキャリブレーションレシピの間に動的なリンクはなく、連動しません。
注釈
ハンドアイキャリブレーションのレシピを修正する必要がある場合は、一旦 でレシピを修正し、修正したレシピを選択して再度ハンドアイキャリブレーションを開始します。
注釈
デュアルフィーディングレシピ(こちら: デュアルフィーディング 参照)を使用する場合は、パートAのみでキャリブレーション処理を行って下さい。この機能のご使用には、 EYE+ バージョン2.1以降が必要です。
自動運転中にピックしたい部品のレシピを選択するか、または正確なキャリブレーションを実施するために使用する、特別な部品を選択することができます(セクション ハンドアイキャリブレーションに使われた部品の使用 を参照)。
重要
いずれの場合でも自動運転時に使用する振動プレートを使用する必要があります。そうしない場合、部品の座標が不正確になる可能性があります。
使用したいレシピを選択すると、以下の情報が表示されます:
レシピ名
部品の高さ
選択された部品の画像
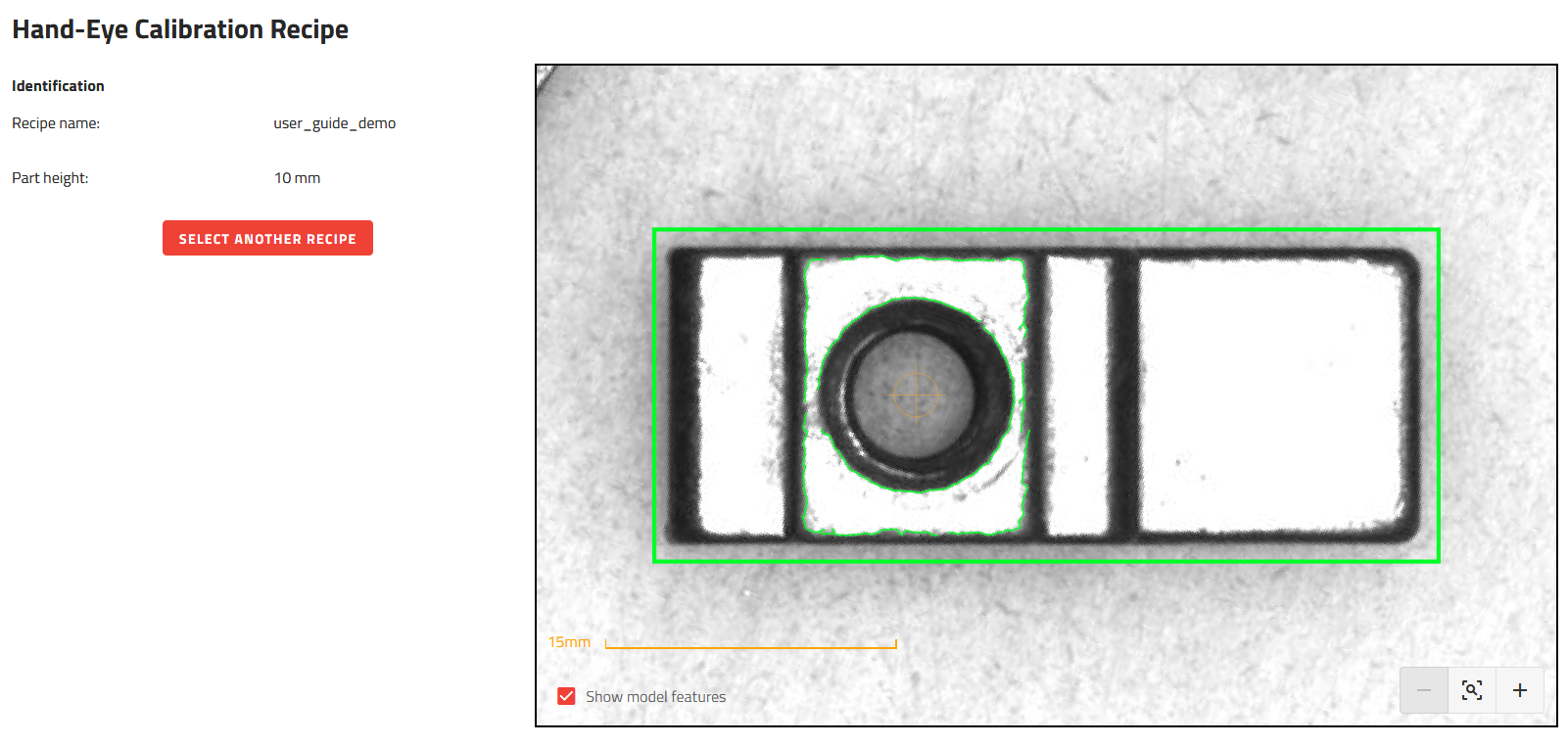
図 169 ハンドアイキャリブレーションのレシピ
2. 第1ポジション
このステップは、5つのサブステップから構成されています。
a.グリッパーの準備
グリッパーを準備する際には2つの方法があります。
最初の方法は、部品をグリッパーに直接入れることです。部品が自動運転時と同じようにグリッパー内に配置されていることを確認してください。部品をグリッパーに対してできるだけ正確に配置するようにしてください。 ツールセンターポイント(TCP) を、レシピで定義したピッキング位置に配置する必要があります。
重要
4つの位置決めステップ( 2. 第1ポジション, 3. 第2ポジション, 4. 第3ポジション, 5. 第4ポジション)において、部品がグリッパ内で完全に同じ位置にない場合、ビジョンにより検出されるピッキング位置が使用するロボットの座標値と十分に一致しないため、キャリブレーションの精度が低下することになります。
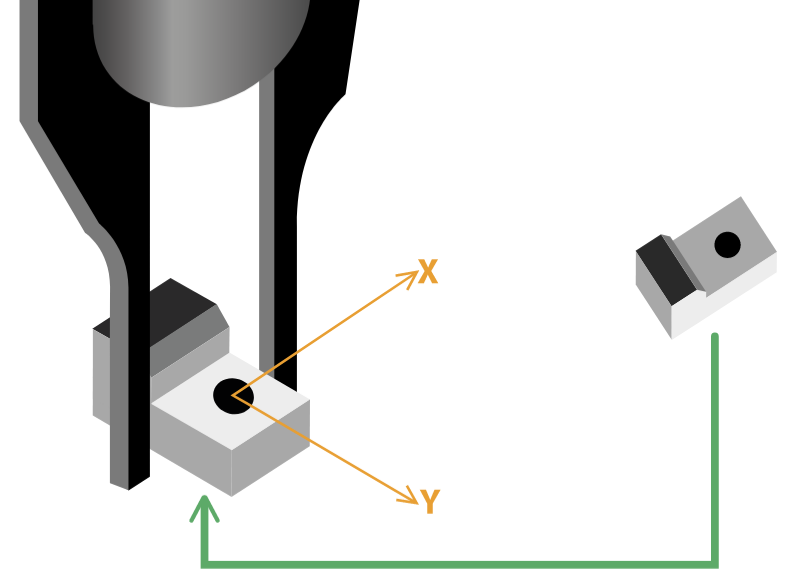
図 170 グリッパーの準備:最初に実施
2つ目の方法は、グリッパーを使わずに部品をプレートに直接置く方法です。部品は、グリッパーでつかめる向きを向いている必要があります。グリッパーが部品に触れる必要がないという利点があります。ハンドアイキャリブレーションではXとYの位置のみを使用するため、部品に触れることなく、ピッキング位置に TCP を位置決めするようにします。
b.ロボットの移動
ロボットを正しい位置に移動させます。これには次の2つの方法があります。
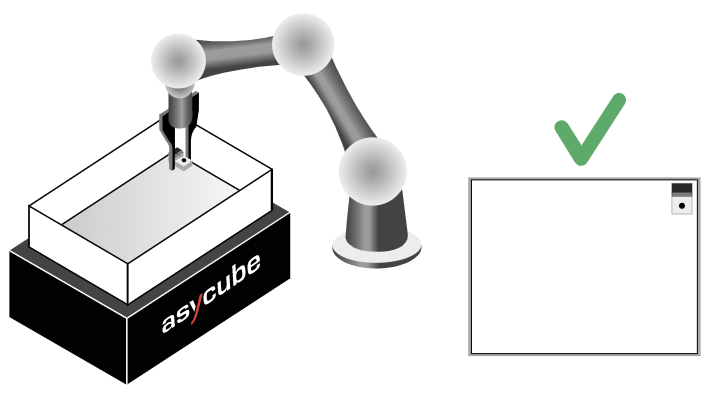
図 171 ロボットを第1ポジションに移動させる
最初の方法では、グリッパー(部品を保持している)をAsycube上の四隅のいずれかに移動させます。部品をプレート表面に完全に接触させる必要があり、常にピッキング位置でグリッパーが部品をしっかりと保持している必要があります。
2番目の方法では、まずAsycube上に部品を配置し、その上に TCP を位置決めします。部品は、最初にAsycube上の4つのコーナーのいずれか1箇所に置く必要があります。
警告
グリッパーは、Asycubeのプレートの端に触れないようにしてください。
注釈
キャリブレーションの精度を上げるために、4つの位置をできるだけ互いに離すようにしてください。
c.ロボット座標
グリッパーのロボット座標を入力します。座標は、選択したロボット座標系の範囲内にある必要があります( ロボット座標系(RCF) )。
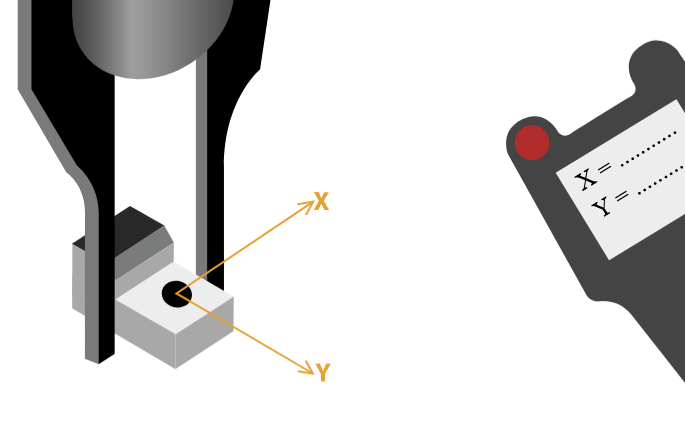
図 172 ロボットの座標を入力
注釈
ロボットの座標をロボットの座標の単位で入力してください。メートル/インチ単位で動作するロボットもあれば、ミリ単位で動作するロボットもあります。
d.ロボットを視野外へ
必要に応じて、部品を離し、カメラの視野外へロボットを動かします。
図 173 カメラの視野外へロボットを移動
重要
ロボットを視野外に移動させる時には、部品が動かないように注意してください。キャリブレーションの精度が低下します。
e.画像の取得
Asycube上の部品を撮影します。 EYE+ は、その部品の座標を視覚座標系で推定します。
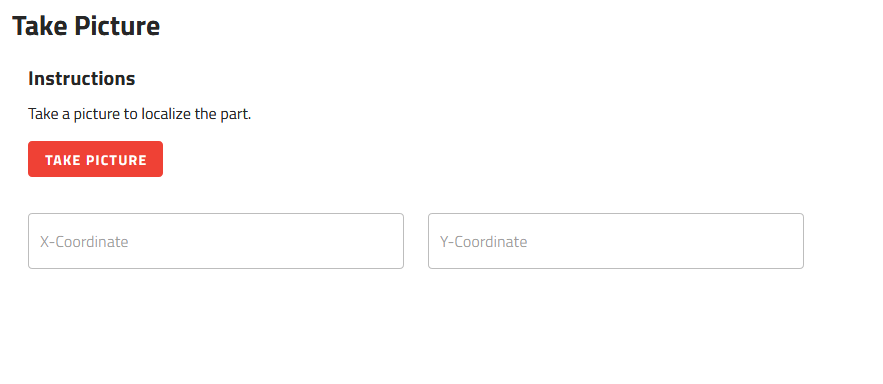
図 174 部品の画像を取得する
注釈
EYE+ がパーツを見つけられなかった場合は、部品を別の場所に移動してこのステップを再度実行してください。それでもうまく行かない場合は、 レシピ を確認してください。
3. 第2ポジション
手順は 2. 第1ポジション と同じです。部品は第1ポジションとは異なるコーナーに配置してください( 図 175 )。
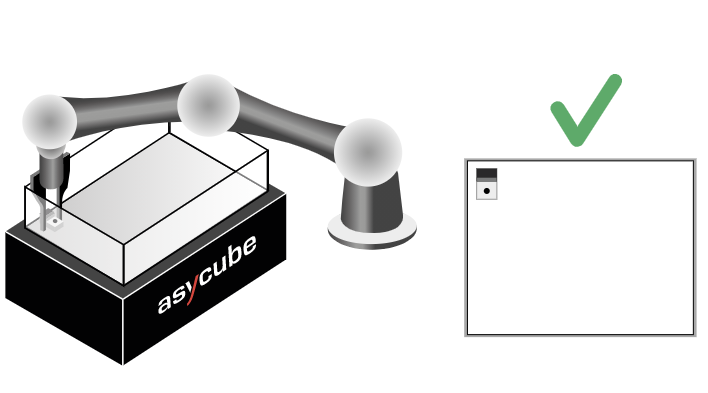
図 175 ロボットを第2ポジションに移動させる
4. 第3ポジション
手順は 2. 第1ポジション と同じです。部品は第1と第2ポジションとは異なるコーナーに配置してください( 図 176 )。
図 176 ロボットを第3ポジションに移動させる
5. 第4ポジション
手順は 2. 第1ポジション と同じです。部品は第1、第2、第3ポジションとは異なるコーナーに配置してください( 図 177 )。
図 177 ロボットを第4ポジションに移動させる
6.ハンドアイキャリブレーションの結果
画面に表示される表( 図 178) で、ハンドアイキャリブレーションの結果を確認することができます。これは、ビジョンとロボット座標系で部品のすべての座標をまとめたものです。また、ハンドアイキャリブレーションの キャリブレーション精度 も表示されます。
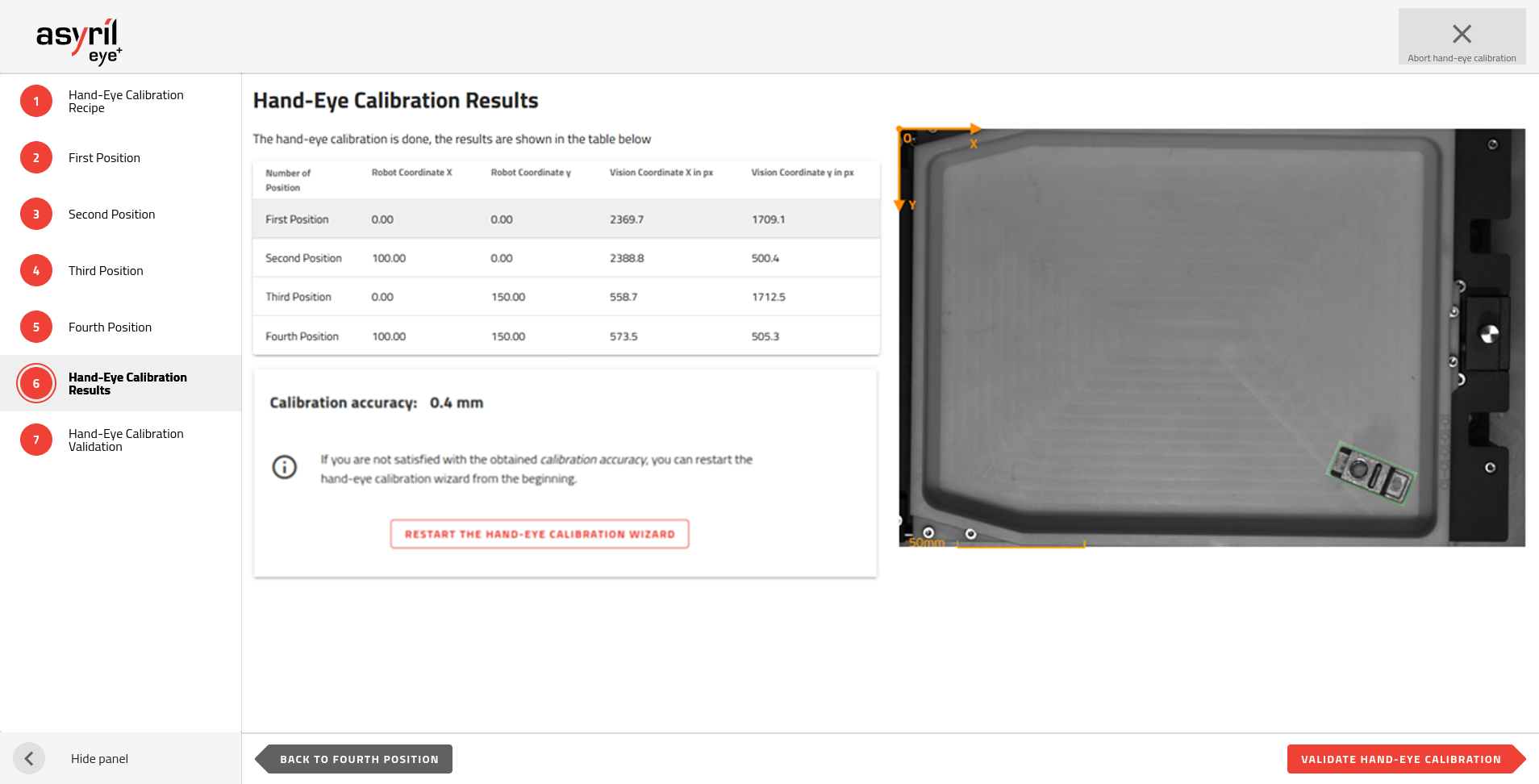
図 178 ハンドアイキャリブレーションの結果
キャリブレーション精度 は、ハンドアイキャリブレーションの精度の品質を表示します。この精度が十分な場合、最後のステップである検証ステップへ進むことができます。
そうでない場合は、ハンドアイキャリブレーションをやり直すことをお勧めします。精度を上げるためのヒントについては、 ハンドアイキャリブレーションの精度を高めるには? の節を参照してください。
7.ハンドアイキャリブレーションの検証
このステップでは、手作業でピック&プレースを行うことで、ハンドアイキャリブレーションを検証することができます。
プレート上のどこか、例えば中央付近に部品を置き、 をクリックします。表に表示されている座標は、ロボット座標系に対応しています。
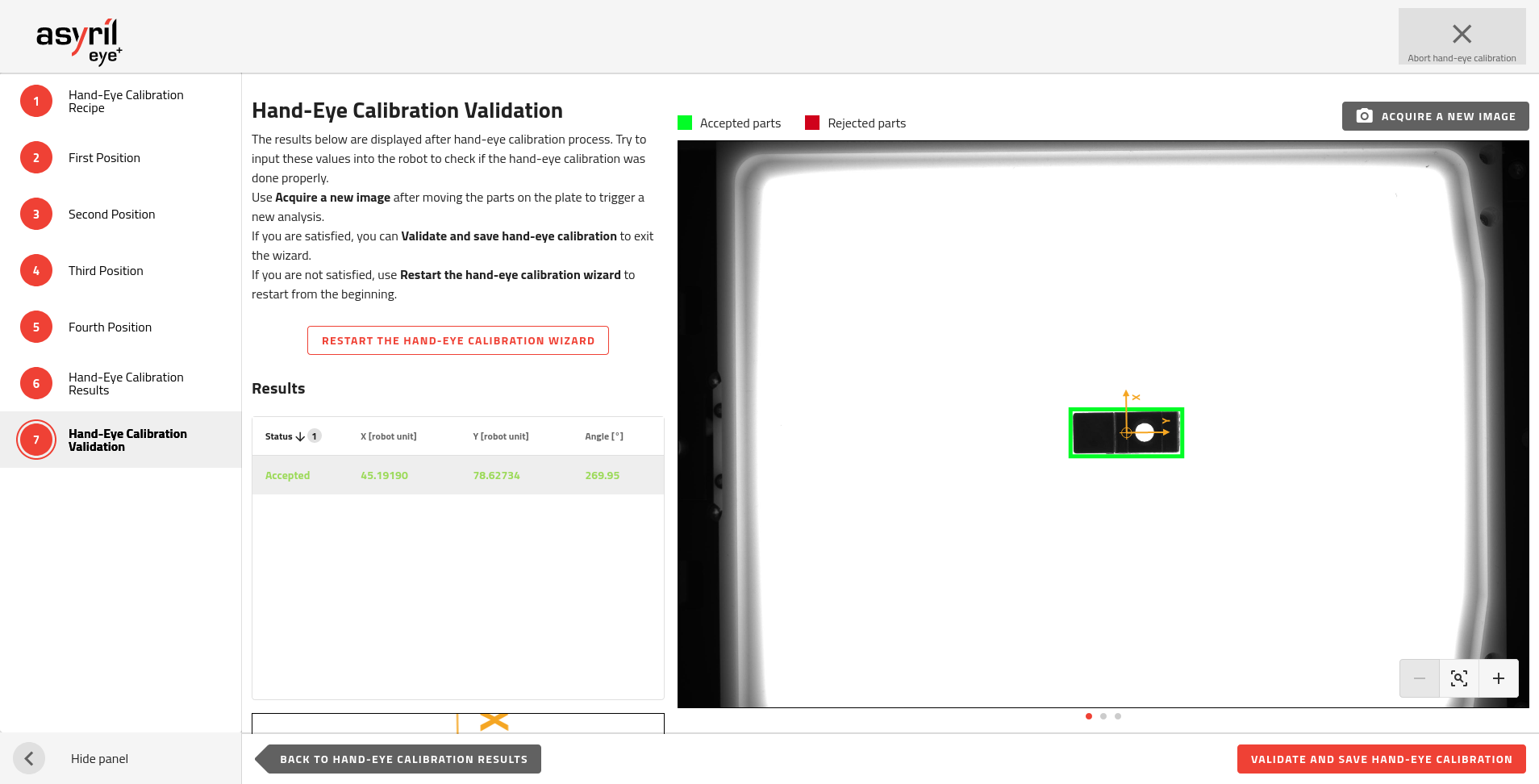
図 179 1個の部品を検出してハンドアイキャリブレーションを検証
次に、検出された座標へロボットを移動させ、部品をピックできるかどうかを検証します。問題がなければ、 をクリックしてウィザードを終了します。
そうでない場合は、ハンドアイキャリブレーションをやり直すことをお勧めします。精度を上げるためのヒントについては、 ハンドアイキャリブレーションの精度を高めるには? の節を参照してください。
注釈
検証ステップを実施するかは任意ですが、ハンドアイキャリブレーションが正しく完了したことを確認するために検証することを推奨します。
注釈
ハンドアイキャリブレーションについて詳細は、 ハンドアイキャリブレーションについて を参照してください。
これで、 EYE+ から送られる座標値が自動的にロボット座標系に送られます。