警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .3.候補の選択
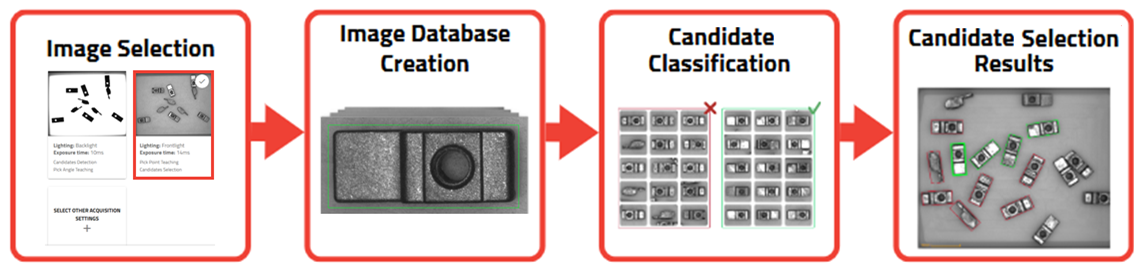
図 73 候補の選択の概要
候補の選択は、ニューラルネットワークを用いた人工知能を活用して、 EYE+ に色々な部品の向きを識別させることを学習させるオプションのステップです。良い候補とは、ロボットのピックに適した向きの部品と定義され、悪い候補とは、それ以外のあらゆる向きの部品と定義しています。
もし、全ての部品が同じ向きの場合や、前ステップにおいて部品サイズで正しい向きの候補を全てフィルタリングできた場合には(例えば 図 74 の部品など)、このステップをスキップできます。 をクリックしてください。
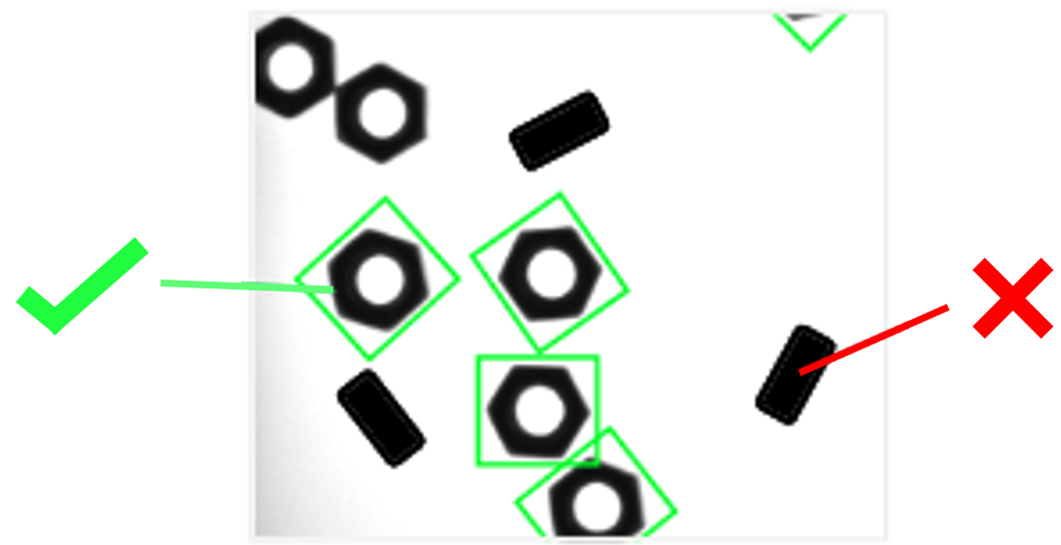
図 74 候補の選択ステップでフィルタリングされた部品の向き