警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .3.候補の選択
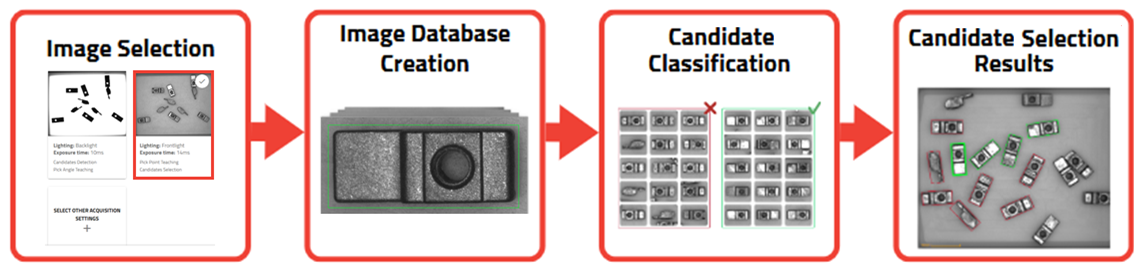
図 64 候補の選択の概要
候補の選択は、ニューラルネットワークを使用した人工知能を活用して、EYE+ に色々な部品の向きを区別することを教示するオプションのステップです。良い候補とは、ロボットのピックに適した向きの部品と定義され、悪い候補とは、それ以外のあらゆる向きの部品と定義されます。
部品の向きが異なっていない場合や、候補の選択の前のステップで部品のサイズに基づいて良い向きの候補をフィルタリングできた場合には(例えば 図 65 の部品など)このステップをスキップできます。 をクリックしてこのステップをスキップします。
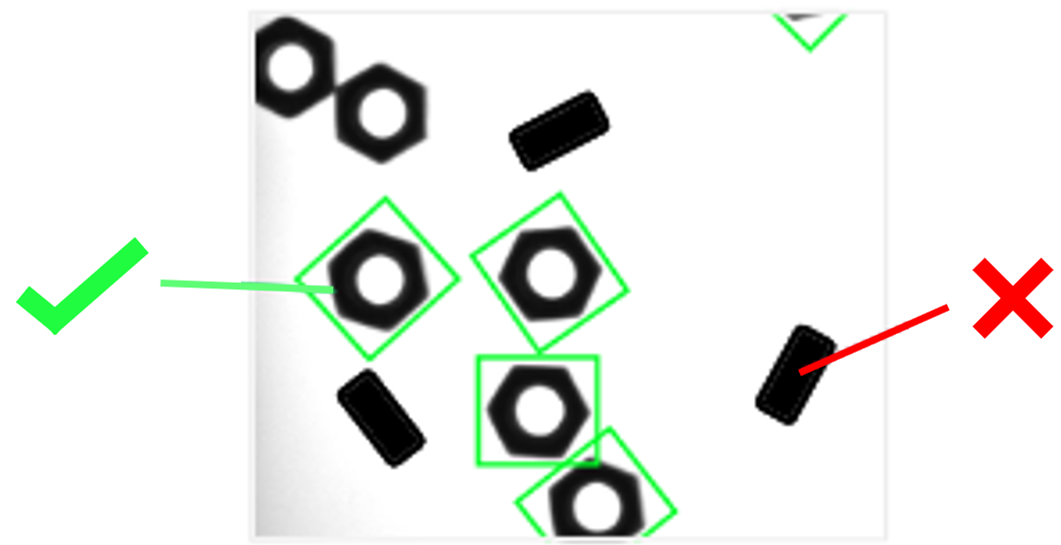
図 65 候補の選択ステップでフィルタリングされた部品の向き