警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .7.アジキューブの設定
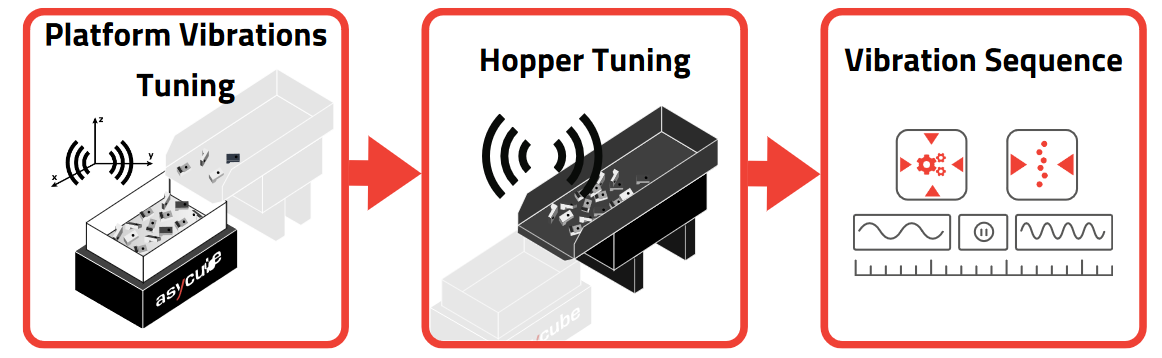
図 118 アジキューブの設定概要
ロボットが、ピック可能なパーツをできるだけ早くピックできるように、ホッパーとアジキューブの振動を最適に設定してください。設定する時は、ホッパーとアジキューブはそれぞれ個々に設定します。
アジキューブ上にある一定の部品数を素早く供給できるように、ホッパーの振動を最適化してください。一定振動時間に一定量の部品をアジキューブ上に供給できるようにすることが重要です。
各方向にすばやく部品が規則的に広がるように、アジキューブの振動を最適化してください。「規則的に広がる」とは、部品が、各々の振動方向に想定通りに広がっていくことを意味します。
振動シーケンスは、設定済みの振動条件をベースに定義されます。システムが、 自動運転中 状態にあり、アジキューブ上にピック可能なパーツがなくなった時に、 get_part または prepare_part コマンドを呼び出すと、振動シーケンスがスタートします。