警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .7.2 ホッパーの調整
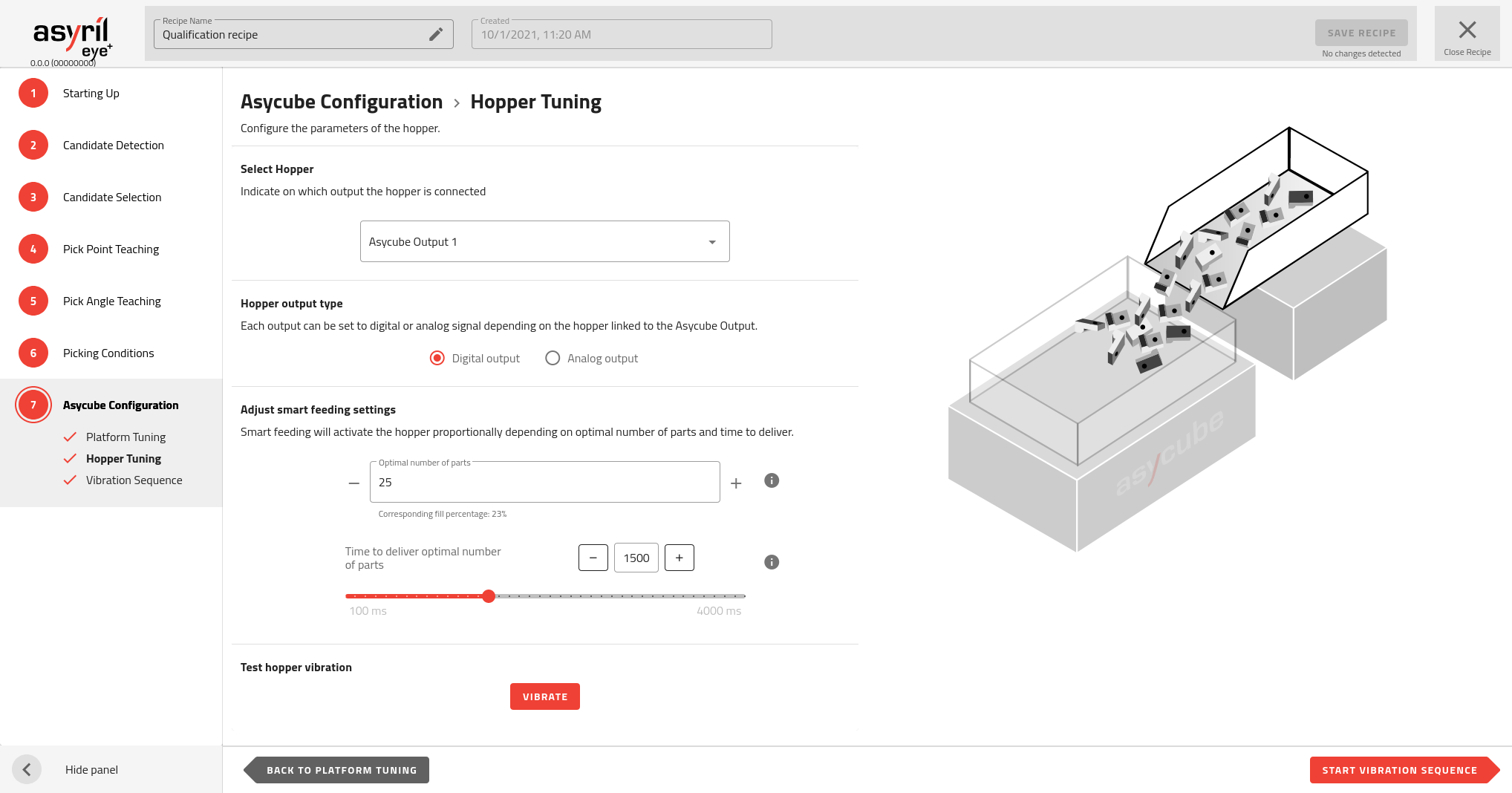
図 121 アジキューブの設定 - ホッパーの調整
アジキューブのプレート上に、規則的の部品数が供給されるように、ホッパーの振動を正しく設定してください。次のことを考慮して、バランスの良い設定値に調整してください。
フロー速度が遅いと、アジキューブ上に適量の部品を充填するには時間がかかりすぎます。
フロー速度が速いと、アジキューブ上に部品が供給されすぎるリスクがあります。
ホッパー・出力調整のパラメータ
アジキューブの型式により、ホッパーが組み込まれているもの( Asycube 50/80 )と、組み込まれていないもの( Asycube 240/380/530 )があります。
Asycube 50/80
Asycube 50/80は、ホッパーが統合されていて、各サイクルで必要な数の部品をプラットフォームに供給して、ロボットがピッキング可能な部品数を確保します。
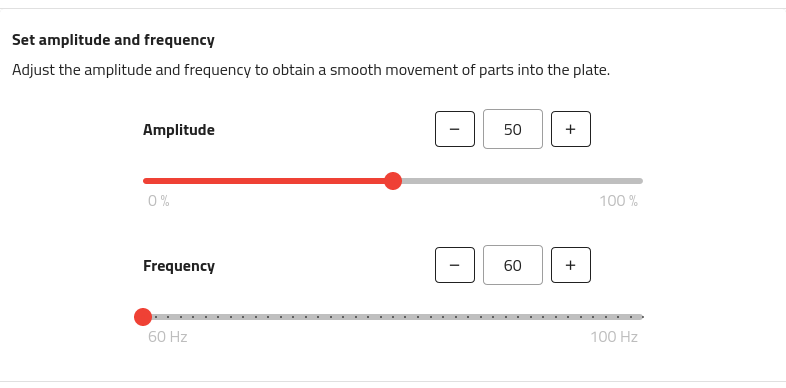
図 122 Asycube 50/80 の振幅・周波数調整について
振幅 アクチュエータに送られる信号の振幅で、最大振幅に対するパーセンテージで定義されます。
振幅を大きくすると、パーツがよりジャンプするようになります。
【レンジ】0-100%
周波数 アクチュエータに送られる信号の周波数です。
部品は、質量、形状、剛性などの要因によって、特定の周波数に反応しやすくなります。
【レンジ】一般的に 60-80 Hz
Asycube 240/380/530
Asycube 240/380/530 は、2つの出力を備えており、通常、1つまたは2つのホッパーを制御して必要な数の部品をプラットフォームに供給し、各サイクルにおいてロボットがピッキング可能な許容数の部品を取得するために使用します。どちらを使用するか選択してください( 図 123 )。
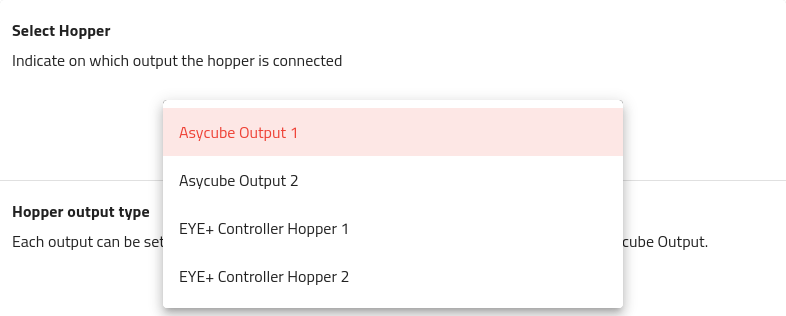
図 123 Asycube 240/380/530 で使用可能な出力のリスト
重要
パージシステムを搭載した Asycube 240 の場合、アジキューブの2番目の出力はそのシステムの操作に必要なため、ホッパーに使用することはできません。
ヒント
また、 GPIOケーブル を使ってコントローラの出力を使用することも可能です。
出力の設定は、実際に何が出力に接続しているかによります。それぞれのレシピについて、どの出力を使うか、そして、その出力がデジタル( 図 124 )モードか、あるいは、アナログ( 図 125 ) モードかを選択することができます。

図 124 Asycube 240/380/530 用デジタル出力構成図
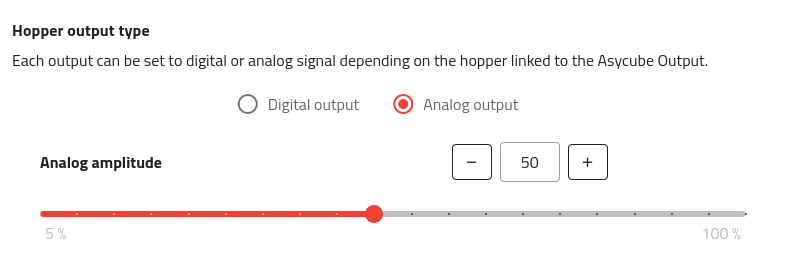
図 125 Asycube 240/380/530 用アナログ出力構成図
ヒント
アナログモードでは、100% または 10V 出力に相当する強度をパーセントで選択できます。
スマートフィーディング設定を調整する
次のパラメータは、振動シーケンスの スマート供給 を設定するのに使われます。
最適な部品数の設定
最適な部品数を算出するには、まずアジキューブ上に何個か部品をランダムに置きます。部品を追加で供給しながら、部品が互いに近づきすぎてきたと思った時に追加供給をやめます。そして、アジキューブ上の部品数を数えてください。これが、最適な部品数になります。
この数値 n を EYE+ Studio に入力します。この数値はスマート供給に必要な数値です。
重要
最適な部品数は、自動運転時にホッパーが起動する際に参照として使います(振動シーケンスの 中の スマート供給 を参照)。
振動の持続時間の設定
供給する部品数は、ホッパー振動の継続時間と振幅で決まります。この調整は、トライアンドエラーにより行われます。
まず、アジキューブから全ての部品を取り出し、ホッパーに部品を入れます。
重要
ホッパーには、自動運転時と同じように部品を載せる必要があります。
をクリックしてホッパーの振動を開始します。
アジキューブ上に落下した部品数を数えます。最適な部品数でない場合は、振動の持続時間を調整し、アジキューブ上に落下する部品数が適当な値になるまで繰り返します。
注釈
最適な個数を供給するまでの時間が長すぎる場合には、ホッパーの振幅を大きくしてホッパー上の部品の移動速度を速くしてから、再度、持続時間を調整するようにすることを推奨します。
重要
標準運転では、ホッパーをシステムに接続するために4つの出力を選択することができます。しかし、Asycube 240にパージシステムを搭載している場合、アジキューブの2番目の出力はシステムを操作するために必要となり、ホッパーには使用できません。このオプションは、ホッパーに使用できる出力として表示されません。また、この場合、出力2を使用したレシピ(他のシステムからインポートしたものなど)は、別の出力を選択するまで自動運転は使用できません。
重要
スマートフィーディングの動作は、システムが使用する関心領域に影響されます。 カスタム関心領域 を使用することで、この動作に影響を与えます。