警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .ロボット
と ロボット からロボットの設定にアクセスします。
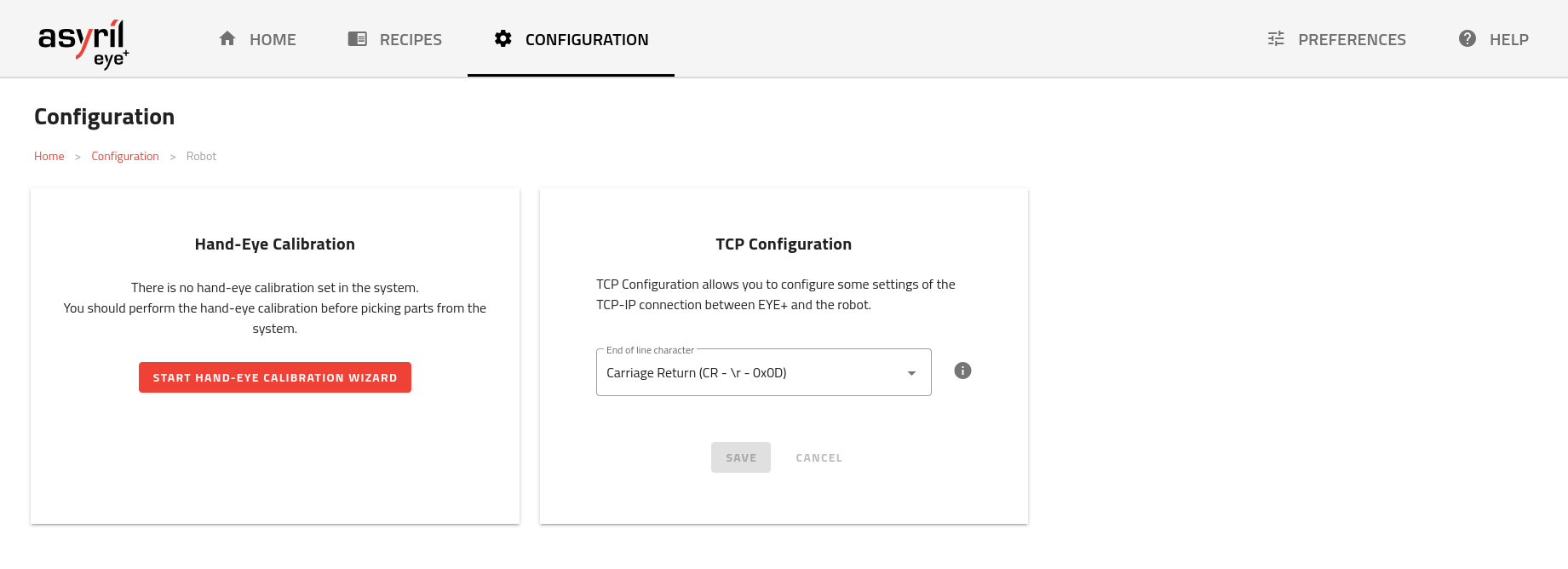
図 143 ロボット設定インターフェース
ロボット設定ページは2つの節からなっています:
ハンドアイキャリブレーション(Hand-eye calibration)
ハンドアイキャリブレーションのエリアには、 ハンドアイキャリブレーションウィザード の現在の状態を知らせ、そこから実行することができます。
3つのインターフェース画面の内のひとつが表示されます:
ハンドアイキャリブレーション未実施 ( 図 144)
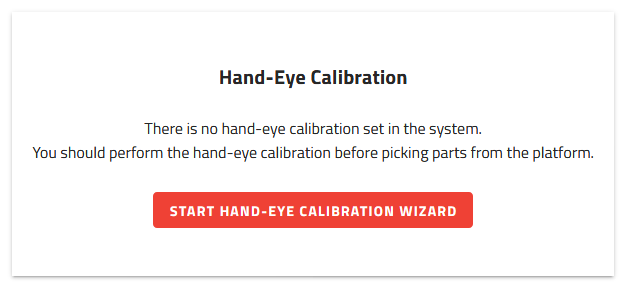
図 144 ハンドアイキャリブレーション未実施
ハンドアイキャリブレーション実施中 ( 図 145)
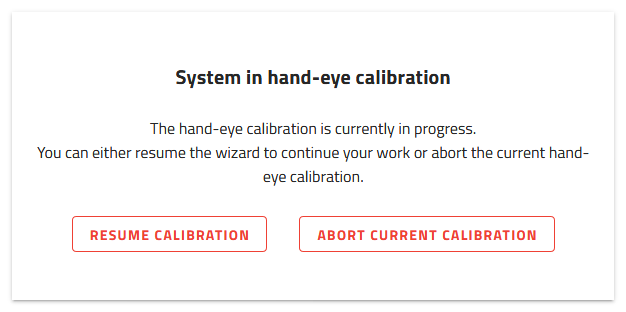
図 145 ハンドアイキャリブレーション実施中
ハンドアイキャリブレーション実施済み ( 図 146)
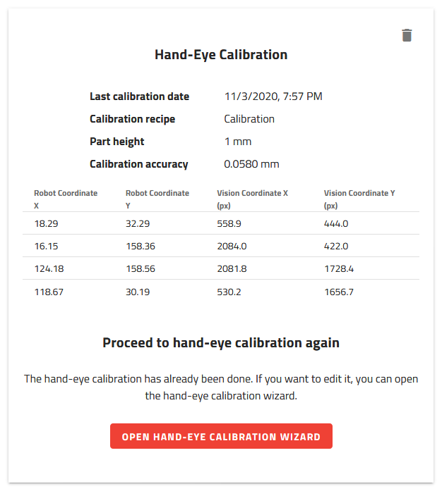
図 146 ハンドアイキャリブレーション実施済み
すでにハンドアイキャリブレーションが行われている場合は、前回のハンドアイキャリブレーションに関する情報があります。
最終のキャリブレーション日付
キャリブレーションレシピ
部品高さ
キャリブレーション精度
ハンドアイキャリブレーションウィザードへアクセス
、または、 をクリックし、 ハンドアイキャリブレーションウィザード をアクセスします。
TCP設定
このセクションでは、行末のコード(デリミタ)を選択することができます。ロボットやPLCによって、この設定が必要になる場合があります。
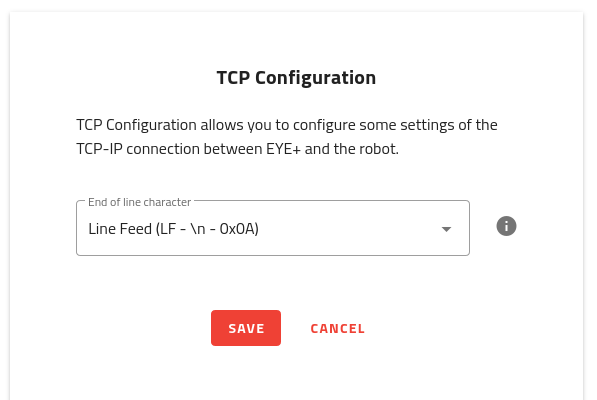
3種類のオプションが用意されています。
LF(行末のコード)は、特殊文字LF(例:
\n、ASCIIコード:0x0A)ですCR + LF (行末のコード)は、特殊文字CR + LF(例:
\r\n、ASCIIコード:0x0D 0x0A)ですCR (行末のコード)は、特殊文字CR(例:
\r、ASCIIコード0x0D)です
EYE+ Controller が使用するデフォルトの行末のコードはLFです。
注
この設定を変更すると、開いていた接続は全て強制的に切断されます。