警告
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Robot
Access the robot configuration through and Robot.
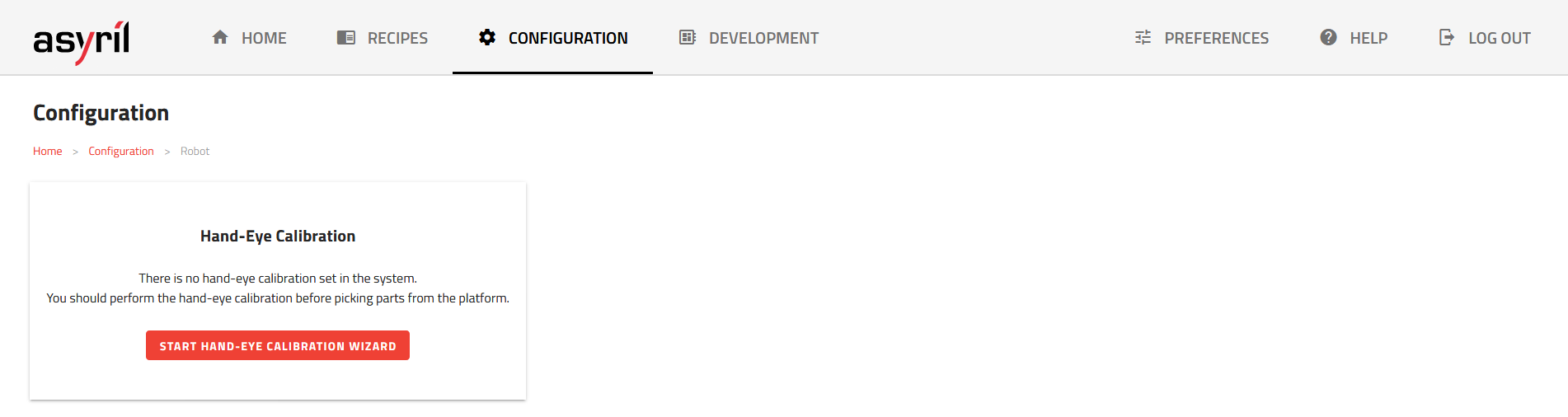
図 127 Robot configuration interface
The hand-eye calibration card informs you about the current state of the Hand-eye calibration wizard wizard and allows you to open it.
Three variants of the interface are possible:
No hand-eye calibration performed (図 128)
図 128 No hand-eye calibration performed
Hand-eye calibration in progress (図 129)
図 129 Hand-eye calibration in progress
Hand-eye calibration already performed (図 130)
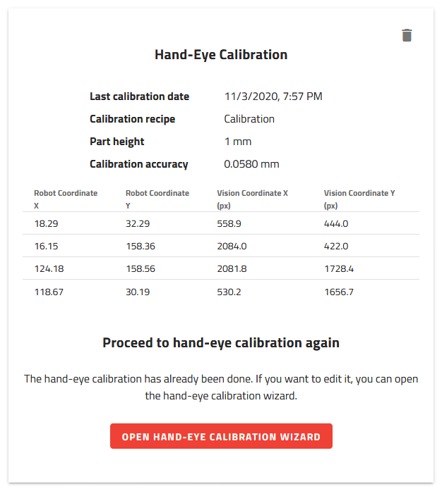
図 130 Hand-eye calibration already performed
If the hand-eye calibration was already performed, some information regarding last hand-eye calibration is available:
Last calibration date
Calibration recipe
Part height
Calibration accuracy
Access hand-eye calibration wizard
Click on or to access the Hand-eye calibration wizard wizard.