警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 5.4 .ロボット
ページの ロボット から、ロボットの設定にアクセスします。
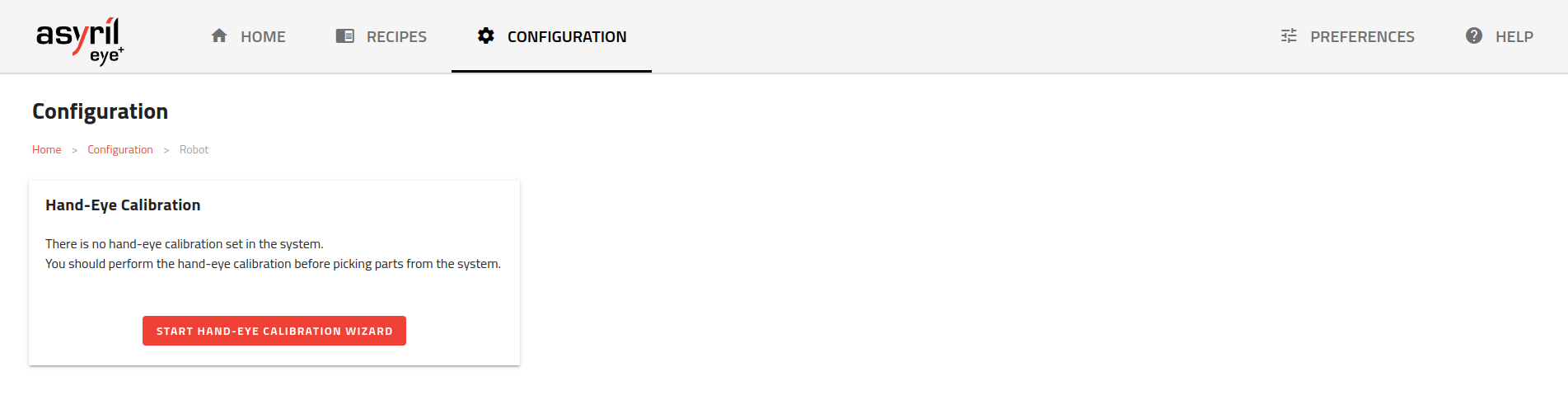
図 173 ロボット設定インターフェース
ハンドアイキャリブレーション
「ハンドアイキャリブレーション」のウインドーでは、 ハンドアイキャリブレーションウィザード の現在の状態を確認したり、ウイザードを開くことができます。
下の3つのインターフェース画面の内のひとつが表示されます。
ハンドアイキャリブレーションは未実行( 図 174)
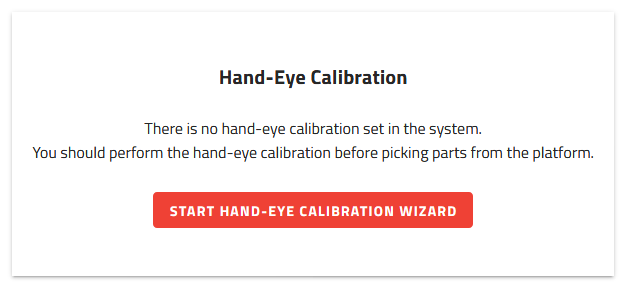
図 174 ハンドアイキャリブレーションは未実行
ハンドアイキャリブレーション中( 図 175)
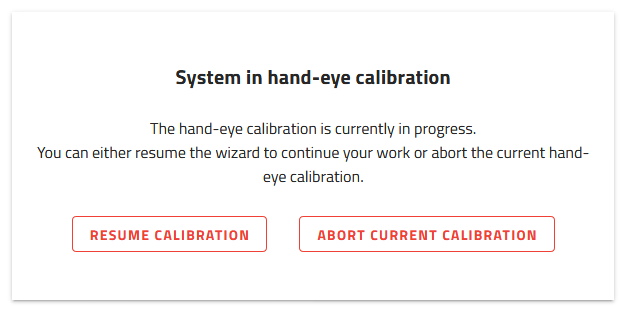
図 175 ハンドアイキャリブレーション中
ハンドアイキャリブレーション済み( 図 176)
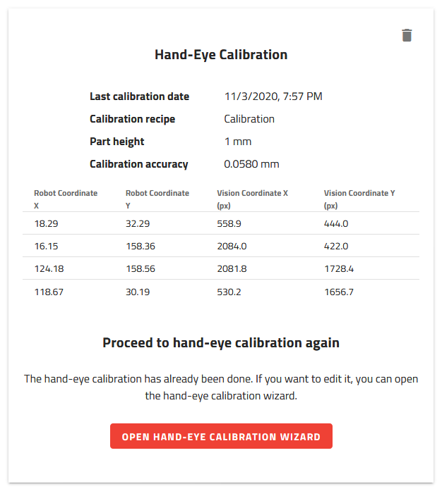
図 176 ハンドアイキャリブレーション済み
すでにハンドアイキャリブレーション済みの場合は、ハンドアイキャリブレーションに関する既存情報があります。
更新日時
キャリブレーションレシピ
部品の高さ
キャリブレーション精度
ハンドアイキャリブレーションウィザードにアクセス
、または、 をクリックし、 ハンドアイキャリブレーションウィザード にアクセスします。