警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .ロボット
と ロボット からロボットの設定にアクセスします。
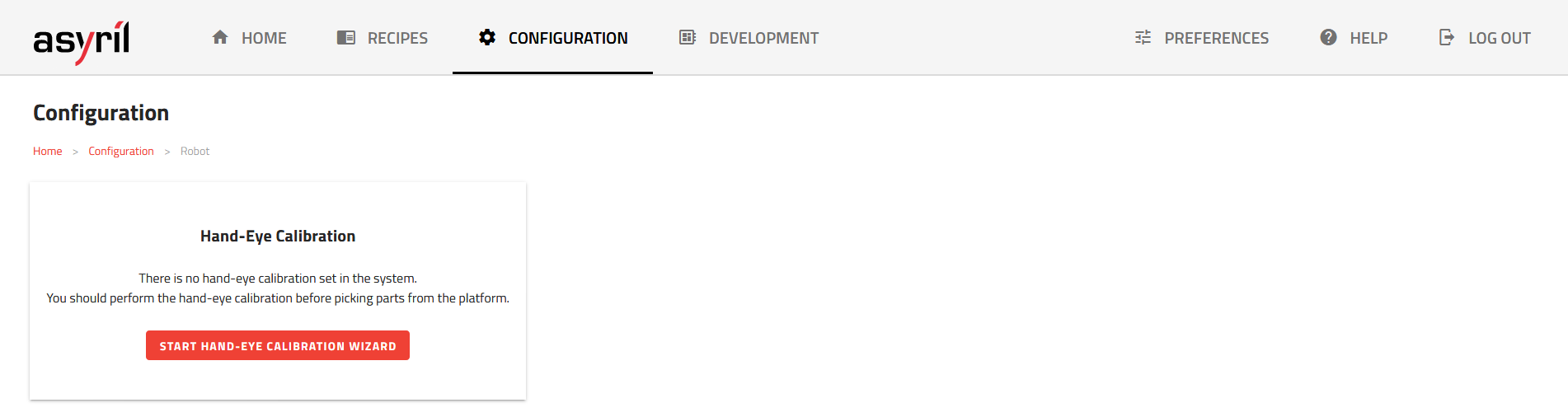
図 134 ロボット設定インターフェース
ハンドアイキャリブレーションダイアログボックスは、 ハンドアイキャリブレーションウィザード ウィザードの現在の状態を知らせ、それを開くことができます。
3つのインターフェース画面の内のひとつが表示されます:
ハンドアイキャリブレーション未実施 ( 図 135)
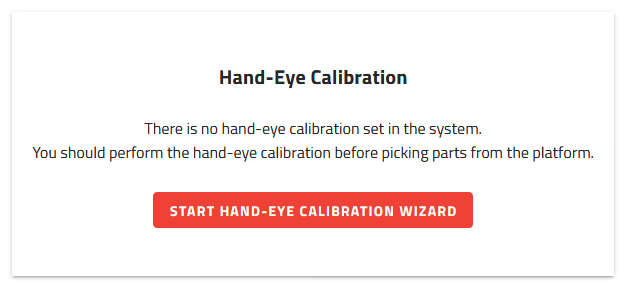
図 135 ハンドアイキャリブレーション未実施
ハンドアイキャリブレーション実施中 ( 図 136)
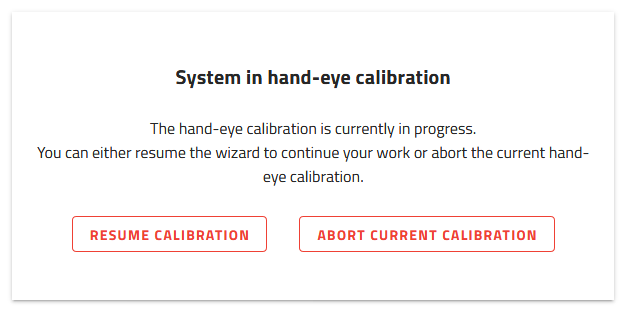
図 136 ハンドアイキャリブレーション実施中
ハンドアイキャリブレーション実施済み ( 図 137)
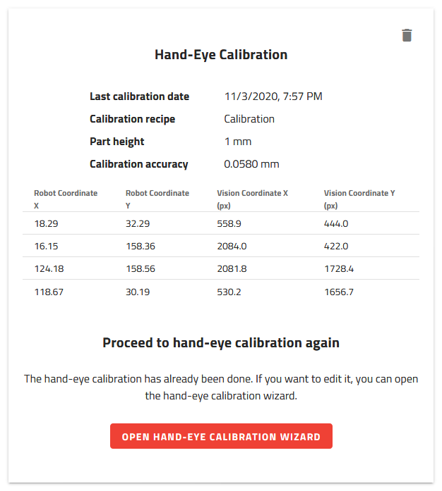
図 137 ハンドアイキャリブレーション実施済み
すでにハンドアイキャリブレーションが行われている場合は、前回のハンドアイキャリブレーションに関する情報があります。
最終のキャリブレーション日付
キャリブレーションレシピ
部品高さ
キャリブレーション精度
ハンドアイキャリブレーションウィザードへアクセス
または をクリックして、 ハンドアイキャリブレーションウィザード ウィザードにアクセスします。