警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .Image after send
パラメータ image_after_send は、 get_part や prepare_part の前に force_take_image を自動化するために利用されます。
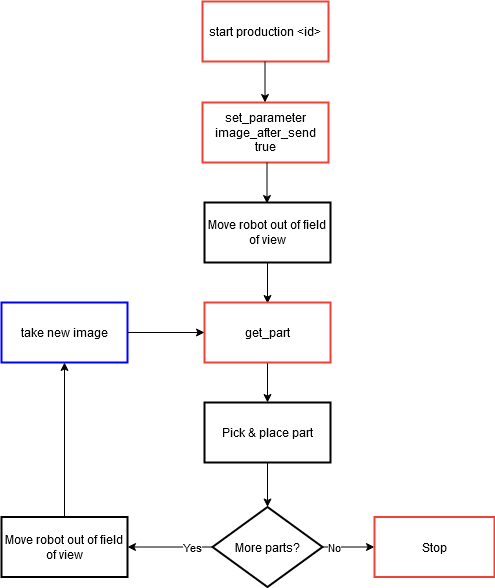
図 202 image_after_send シナリオ
[set_parameter image_after_send true]: パラメータ image_after_send を true に設定します。
[Move robot out of field of view]: get_part コマンドを呼ぶ前に、カメラの視界を遮るものがないことを確認する必要があります。
[get_part]: get_part コマンドは、Asycubeを振動させて画像を取得するか、部品の座標を直接送信します。
[Pick & place part]: 部品をピックして配置します。部品をピックした時や配置した時、または、ロボットの移動中に、ロボットがAsycubeに触れて残りの部品を移動させます。
[Move robot out of field of view]: get_part コマンドを呼ぶ前に、カメラの視界を遮るものがないことを確認する必要があります。
[take new image]: EYE+ パラメータ image_after_send が true に設定されていると、コマンド get_part の前に自動的に新しい画像を取得します。これにより、部品の座標値が保証されます。
手順1からやり直します。EYE+ がコマンド stop production を受信するとサイクルが停止します。