警告
現在、このドキュメントの古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .Force take image
コマンド force_take_image を用いたシナリオは、外部からの外乱が原因でAsycube上の部品が動くことが分かっている場合に使用します。外乱は、部品のピックアンドプレース時に発生したり、単にロボットの動作中に発生したりことがあります。
コマンド force_take_image は、既知の外乱の後に別の画像を取得して部品の座標値を確認するのに便利です。 図 201 、またはコマンドの手順に従った方法については get_part を参照してください。
注釈
パラメータ can_take_image が false に設定されている場合、コマンド force_take_image はスタートしません。
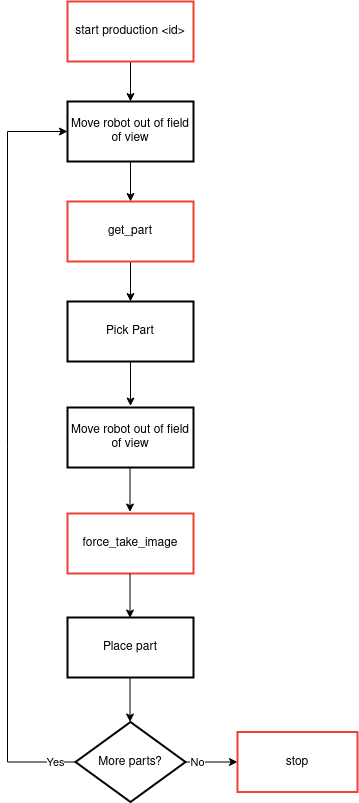
図 201 force_take_image with get_part: 2つのケース
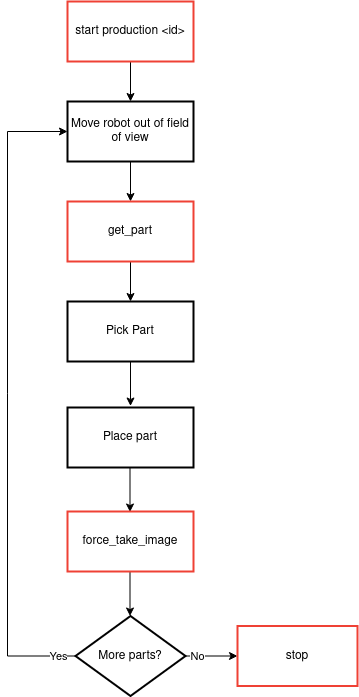
図 201 の左のシナリオは、以下の手順に従います:
[Move robot out of field of view] では、 get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
[get_part] では、 get_part コマンドが、Asycubeを振動させて画像を取得するか、部品の座標値を直接送信します。
[Pick part] では、部品をピックします。部品をピックする時に、ロボットがAsycubeに触れて残存部品を移動させます。
[force_take_image] では、 EYE+ に強制的に画像を取得させ、メモリに保存されている座標値を新しい座標値に更新します。
手順1からやり直します。EYE+ が stop production コマンドを受信するとサイクルが停止します。